

Six-degree-of-freedom parallel micro platform
A micro-platform, degree of freedom technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of large weight size, few degrees of freedom, poor stiffness, etc., to reduce bending deformation, reduce weight, reduce The effect of inertia
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
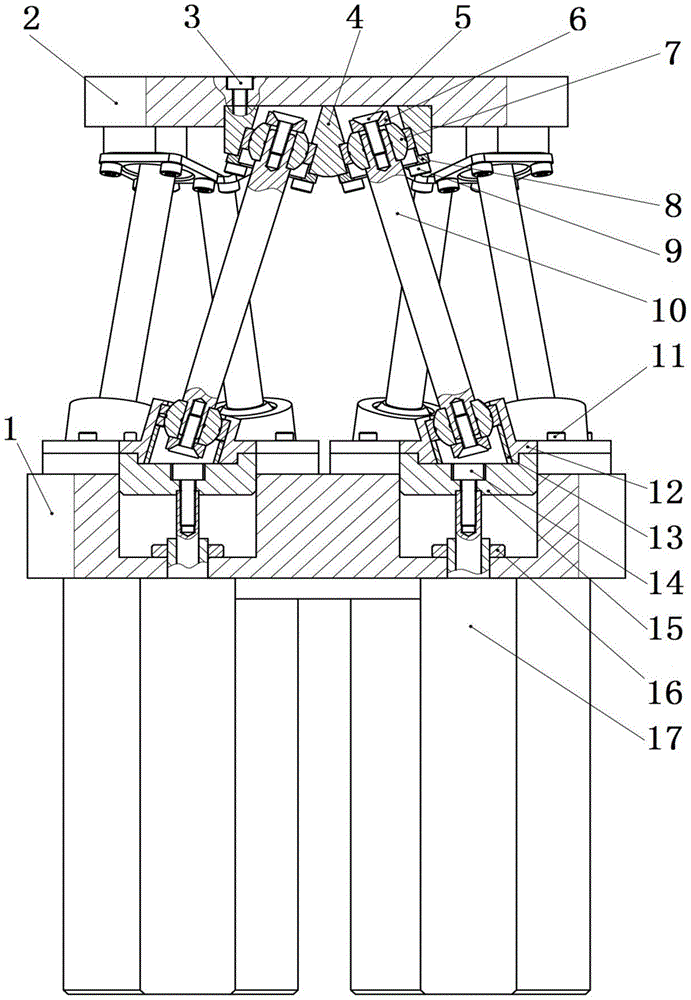
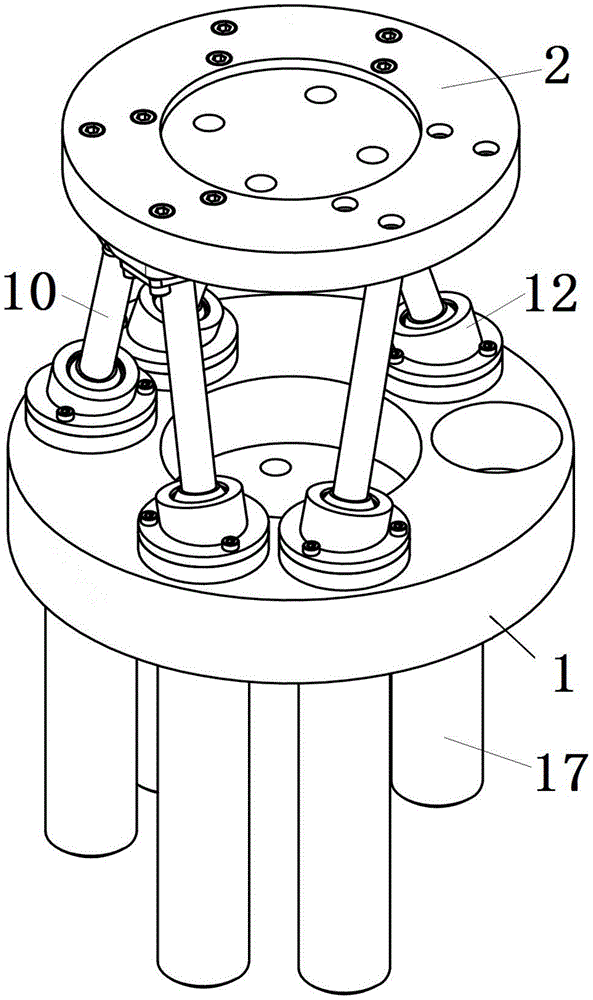
[0026] refer to figure 1 with figure 2 , the structure of the six-degree-of-freedom parallel micro-platform of the present invention is to include a static platform 1 and a dynamic platform 2, and three groups of fixed bearing seats are evenly installed on the lower surface of the dynamic platform 2, and each group of fixed bearing seats passes through two branch chains and the static platform downwards. 1 Transmission connection, that is, there are three sets of fixed bearing seats and six branch chains between the static platform 1 and the dynamic platform 2;
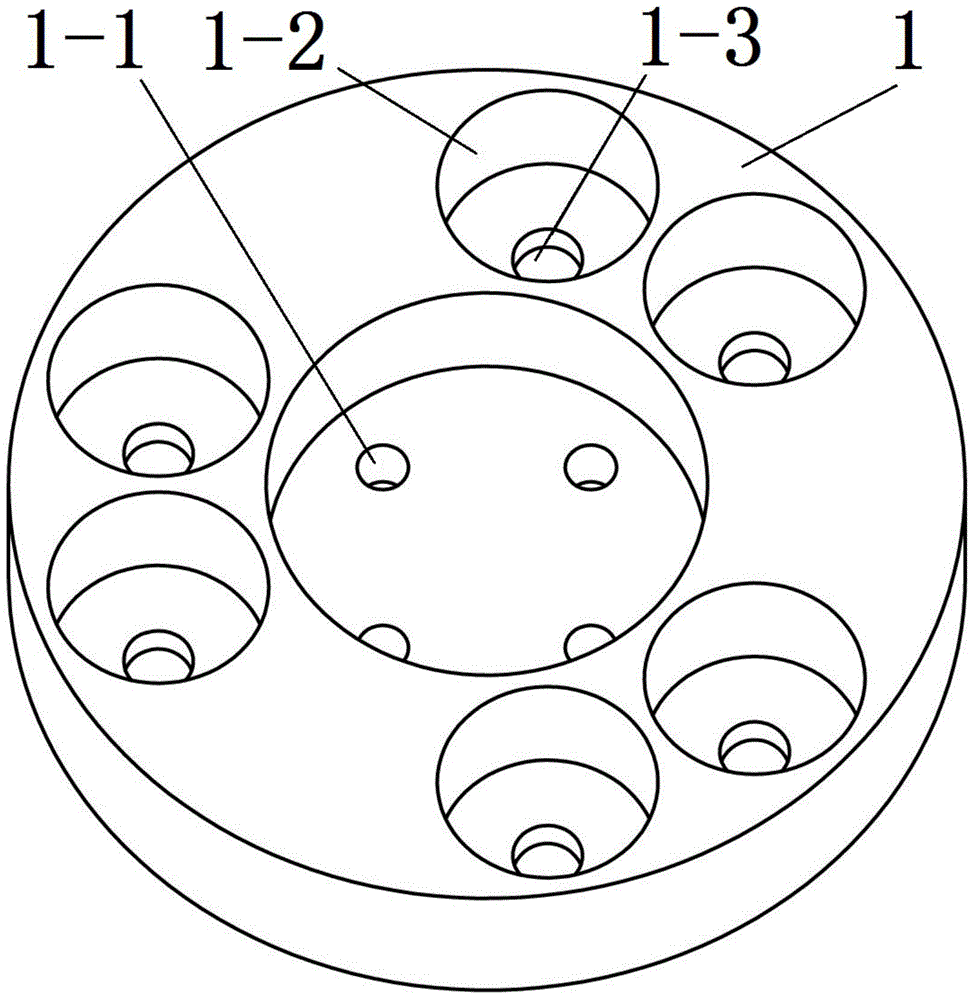
[0027] refer to image 3 , the static platform 1 has a plurality of micro-platform installation holes 1-1 in the groove of the inner ring along the axial direction, and the static platform 1 has a plurality of groove-type slideways 1-2 in the outer ring of the axial direction, and...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More