

Flexible satellite attitude maneuvering control method based on tracking of time-energy consumption optimal trajectory
A technology for tracking time and flexible satellites, applied in three-dimensional position/course control, etc., can solve the problems of poor robustness, high flywheel energy consumption, etc., and achieve good robustness, complete robustness, and energy saving consumption effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
[0035] Specific implementation mode one: combine figure 1 This implementation is described, based on the tracking time-energy optimal trajectory control method for flexible satellite attitude maneuvering. It includes the following steps:
[0036] Step 1: Use x-y-z sequence Euler angles to describe the satellite attitude, establish the dynamics and kinematics equations of the satellite, ignore the influence of flexibility factors under the premise of reasonable bandwidth design, and simplify the dynamic model of the flywheel as the actuator, Design a nonlinear decoupled torque controller;
[0037] Step 2: Under the premise that the initial attitude angle, initial attitude angular velocity, target attitude angle, target attitude angular velocity, moment of inertia and output torque amplitude are given, according to the optimal control method of time-energy consumption, starting from the moment of maneuvering, real-time Calculate an optimal angle tracking trajectory and its c...
specific Embodiment approach 2
[0039] Specific implementation mode two: the specific operation steps of step 1 of this embodiment mode are:
[0040] For a wheel-controlled spacecraft with a flexible solar sail, considering the influence of the disturbance moment, the attitude dynamic equation and the sail flexible vibration equation are:
[0041] I s ω . s + ω s × I s ω s + F s η . . ...
specific Embodiment approach 3
[0064] Specific implementation mode three: the specific operation steps of step 2 of this embodiment mode are:
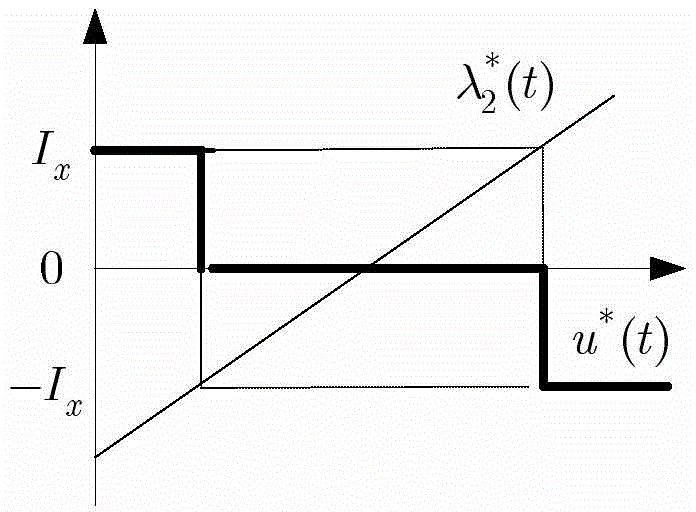
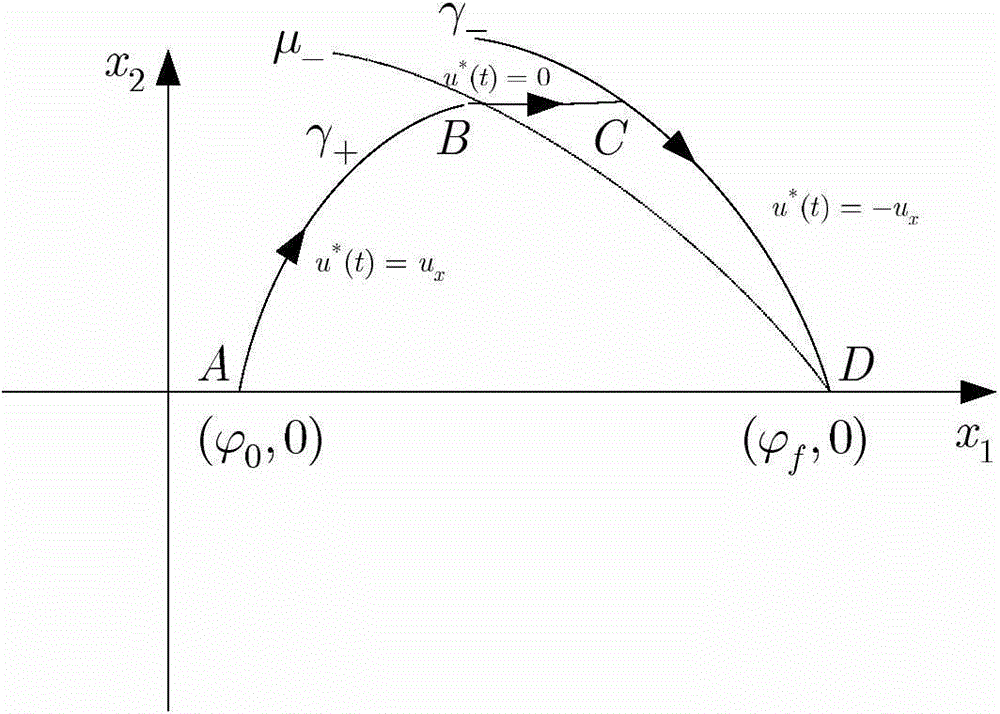
[0065] Time-energy optimal control is the weighting of time optimal control and energy optimal control, that is,
[0066] J = ∫ 0 t f [ ρ + | u ( t ) | ] dt - - - ( 10 )
[0067] Among them, ρ≥0 is the time weighting coefficient, indicating the designer’s emphasis on the response time; if ρ=0, it means that the response time is ignored, and only the most economical energy consumption is considered; if ρ=∞, it means that the energy consumption is not considered Consumption, only requires the shortest time. tf is the maneuvering time, u(t) is the torque output ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More