

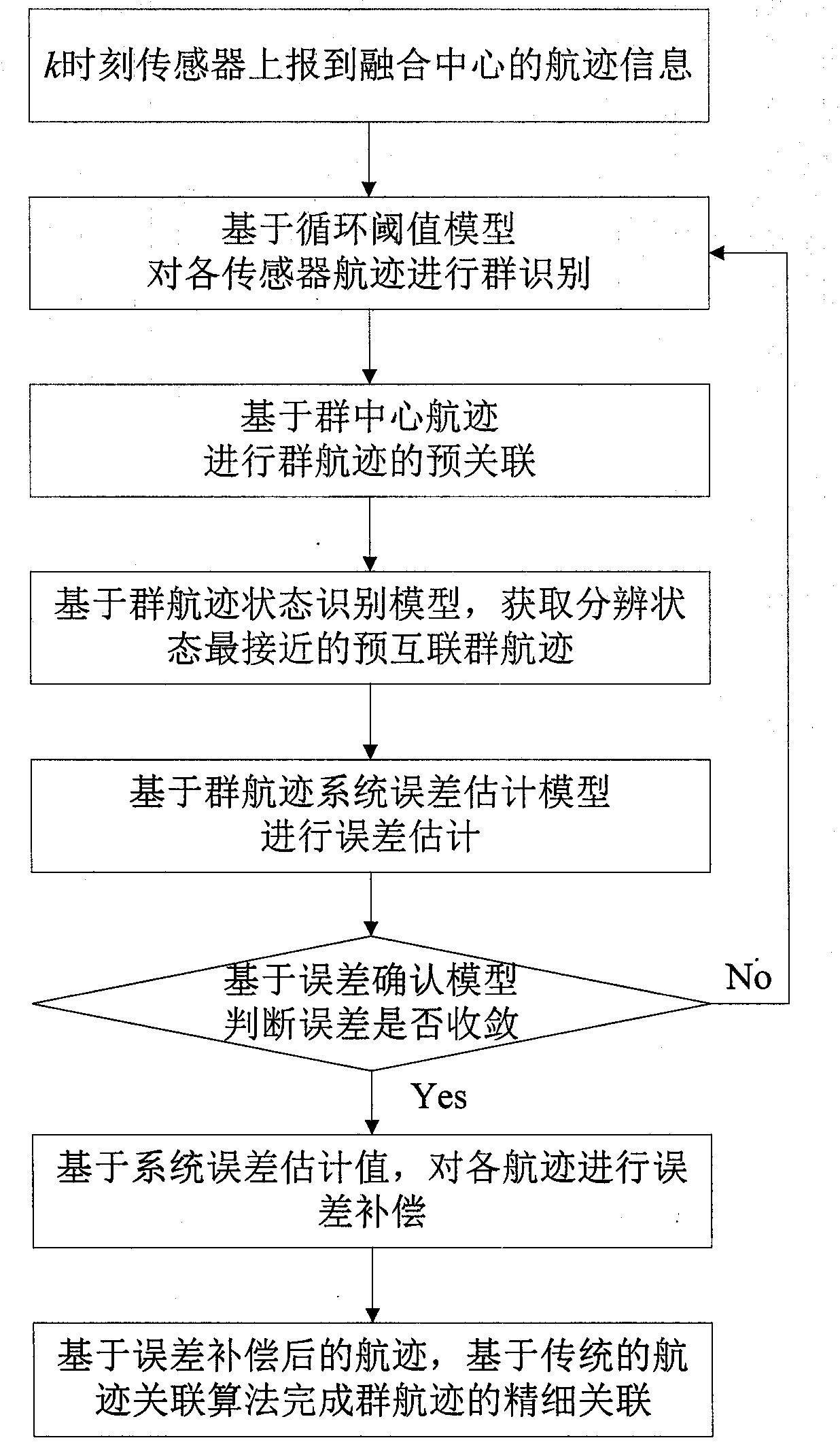
Error compensation-based group track fine association algorithm under system error
A system error and track technology, applied in the field of multi-sensor and multi-target information fusion, can solve the problems of estimated value divergence, track coarse correlation gate intersection, and insufficient estimation of target track complexity in the group, so as to improve real-time performance Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
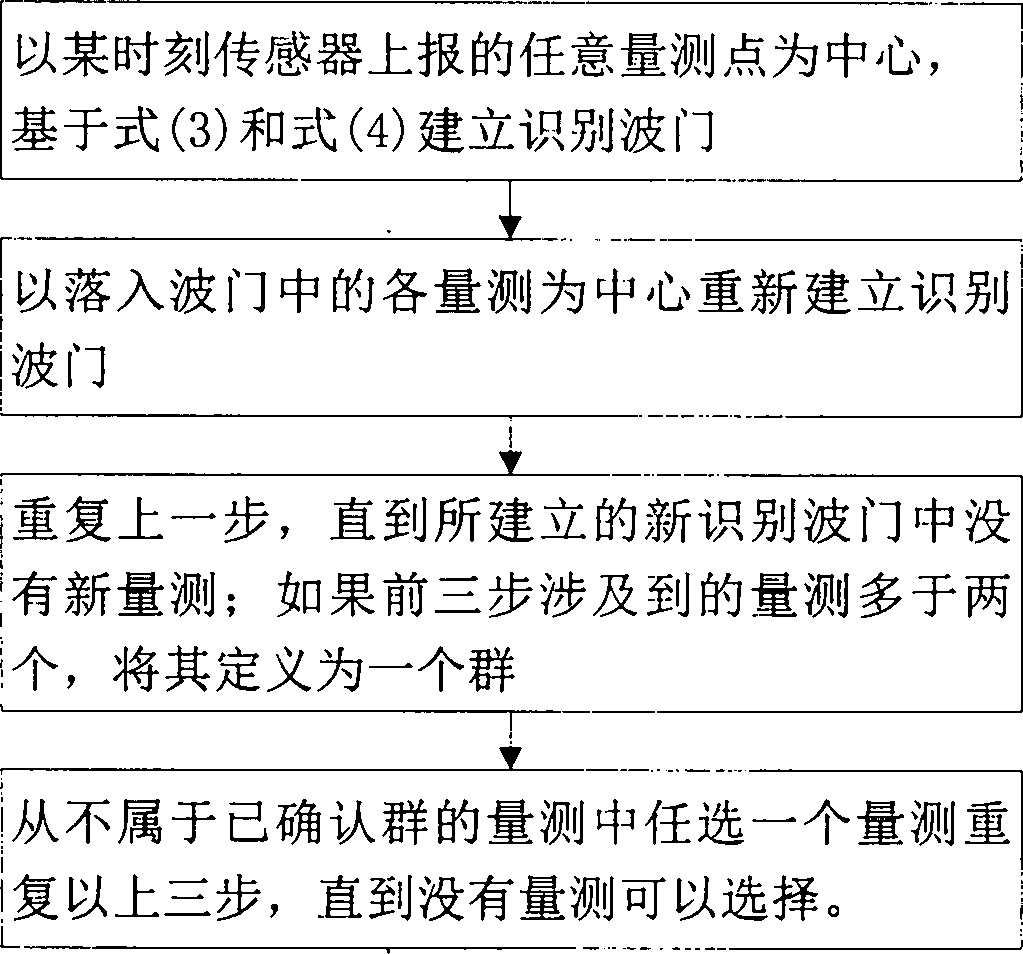
[0016] Assume that the set of track numbers of sensor A and sensor B at time k is
[0017] u A (k) = {1, 2, ..., n A}, U B (k) = {1, 2, ..., n B} (1)
[0018] Among them, n A , n B are the number of tracks reported by the two sensors, respectively.
[0019] definition are the state update values of sensor A to target i and sensor B to target j in the fusion center coordinate system at time k, respectively, and
[0020] X ^ A i ( k | k ) = [ x ^ A ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More