

Delta robot time optimal trajectory planning method
A technology of trajectory planning and robotics, applied in the direction of instruments, adaptive control, control/regulation systems, etc., can solve problems such as runge and motion that are difficult to meet the optimal requirements, and achieve faster search speed, improved control efficiency and stability , to reduce the effect of impact
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0015] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with specific embodiments and with reference to the accompanying drawings.
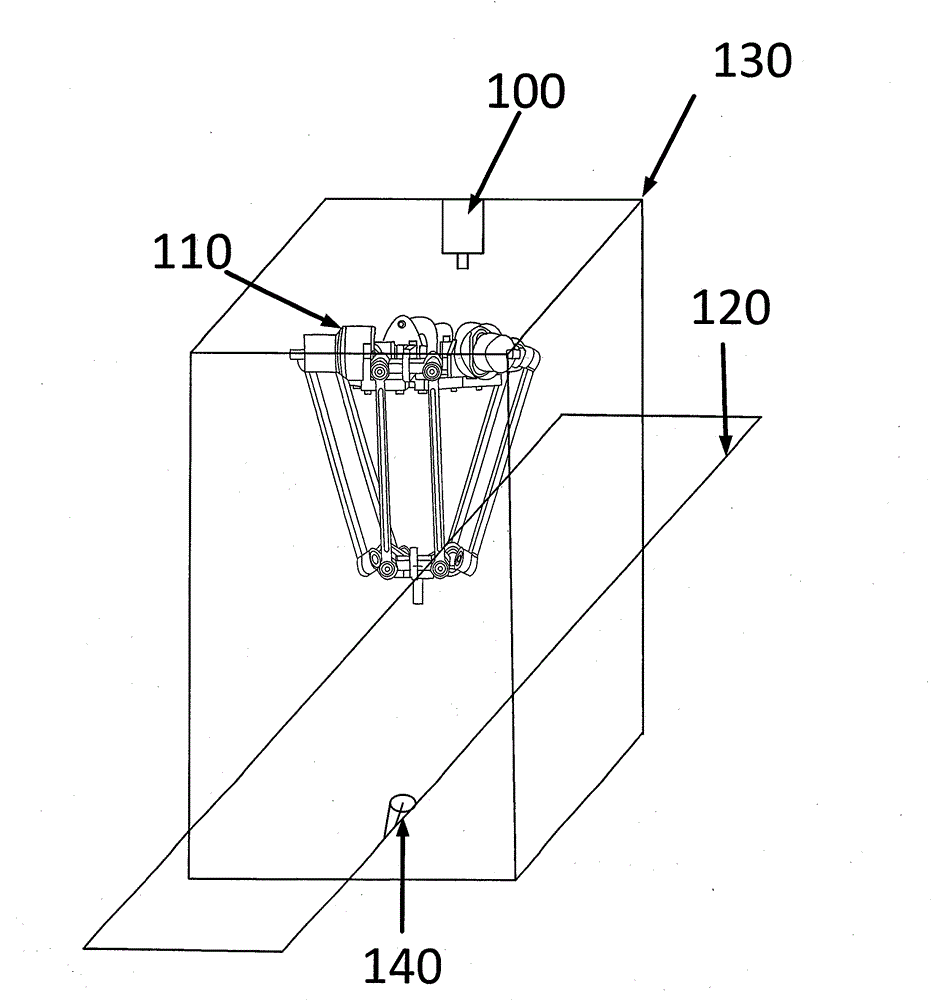
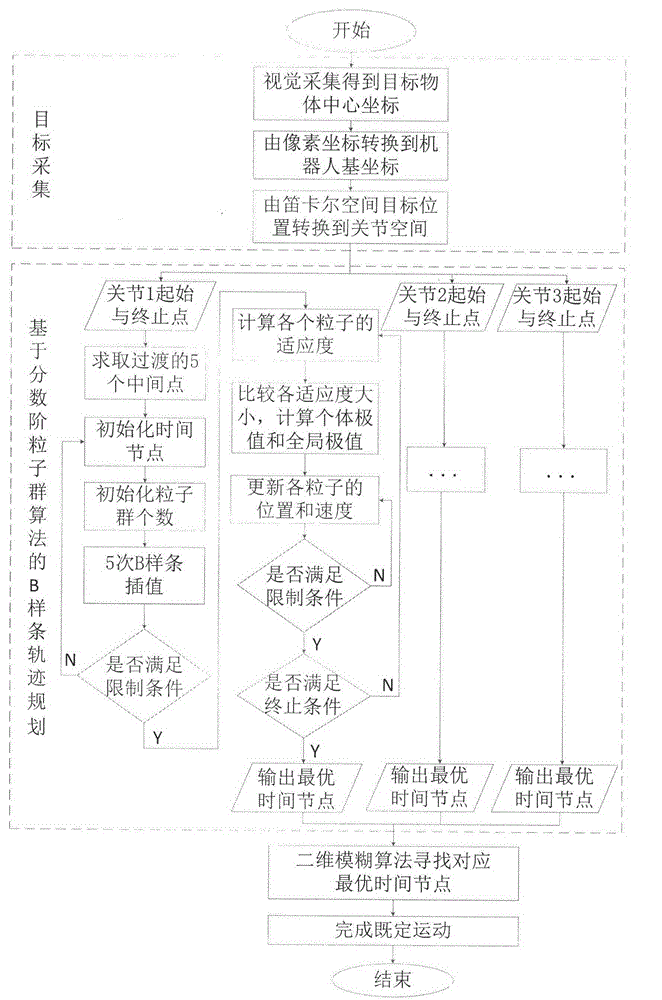
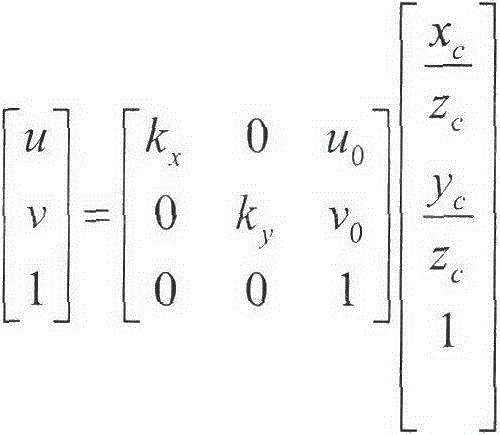
[0016] The basic purpose of the present invention is to take the Delta robot as the running platform, carry out the trajectory planning of the joint space for the action of grasping the objects on the conveyor belt, and take the optimal time as the goal within the range that the mechanical structure of the robot can bear, and carry out the optimization of each joint of the Delta robot. control. The main process is divided into target acquisition, B-spline trajectory planning based on fractional particle swarm optimization algorithm, and two-dimensional fuzzy algorithm to find the corresponding optimal time node offline, such as figure 1 shown.
[0017] Further, the specific steps are:
[0018] (1) Install the Delta robo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More