

A 3D point cloud automatic completion method
A 3D point cloud and automatic completion technology, which is applied in image data processing, 3D modeling, instruments, etc., can solve the problems that the occluded parts cannot be scanned by the laser, and the data is missing, so as to achieve fast processing speed and complete completion. high precision effect
Active Publication Date: 2017-05-03
厦门思总建设有限公司
View PDF2 Cites 0 Cited by
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
[0004] During the acquisition process of the 3D point cloud, the scanned object is often faced with the problem of being occluded by other objects, so that the occluded part cannot be scanned by the laser, resulting in the loss of data in this part
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View moreImage
Smart Image Click on the blue labels to locate them in the text.
Smart ImageViewing Examples

Examples
Experimental program
Comparison scheme
Effect test
Embodiment
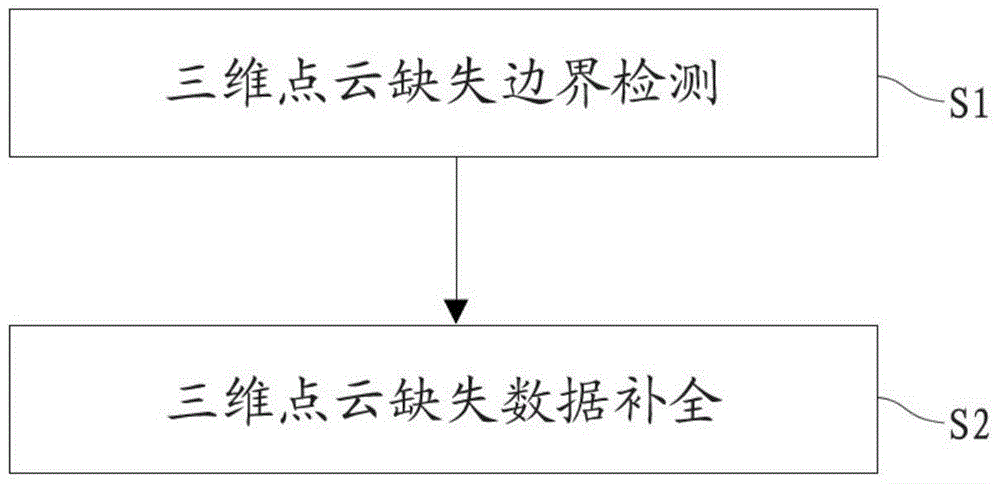
[0038] see figure 1 , the invention discloses a three-dimensional point cloud automatic completion method, which comprises the following steps:
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More PUM
 Login to View More
Login to View More Abstract
The invention discloses a three-dimensional point cloud auto-completion method. The method comprises the following steps: S1, on the basis of point cloud data of the last echo, missing boundary detection is conducted on a three-dimensional point cloud to obtain edge points reflecting the missing boundary; and S2, point cloud data matched with the edge points are extracted from the three-dimensional point cloud, and missing positions of the raw three-dimensional point cloud are filled with the matched point cloud data to achieve completion of the three-dimensional point cloud. The method obtains the missing boundary of the three-dimensional point cloud on the basis of the point cloud data of the last echo and completes the three-dimensional point cloud according to the missing boundary data, so that complete three-dimensional point cloud data can obtained, thereby facilitating subsequent processing such as three-dimensional reconstruction. Meanwhile, the method is high in completion precision and high in processing speed.
Description
technical field [0001] The invention relates to the field of three-dimensional point cloud processing, in particular to an automatic completion method for three-dimensional point cloud. Background technique [0002] The 3D point cloud is a collection of massive points expressing the spatial distribution of the target and the surface characteristics of the target under the same spatial reference system. [0003] With the rapid development and wide application of 3D laser scanning technology, 3D point cloud data, especially 3D color point cloud data containing point cloud color information, has become an important data form for recording the spatial distribution and surface characteristics of objects. [0004] During the acquisition process of the 3D point cloud, the scanned object is often faced with the problem of being occluded by other objects, so that the occluded part cannot be scanned by the laser, resulting in the loss of data in this part. This makes it particularly ...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More Application Information
Patent Timeline
 Login to View More
Login to View More Patent Type & AuthorityPatents(China)
IPC IPC(8): G06T17/00
Inventor王程蔡志鹏温程璐程明李军
Owner厦门思总建设有限公司