

Five-point relative orientation method based on forward intersection constraints
A technology of relative orientation and forward intersection, which is applied in image data processing, instrumentation, computing, etc., can solve the problems that coplanarity cannot ensure the intersection of pairs of rays with the same name, it is difficult to ensure the success of the essential matrix solution, and the failure of the essential matrix solution
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0054] A five-point relative orientation method based on forward intersection constraints, comprising the following steps:
[0055] Step 1. Take two different perspective images of the measured object containing five points:
[0056] Use the binocular vision system or the same camera to shoot the measured object containing five points from different angles of view (such as figure 1 two images shown).
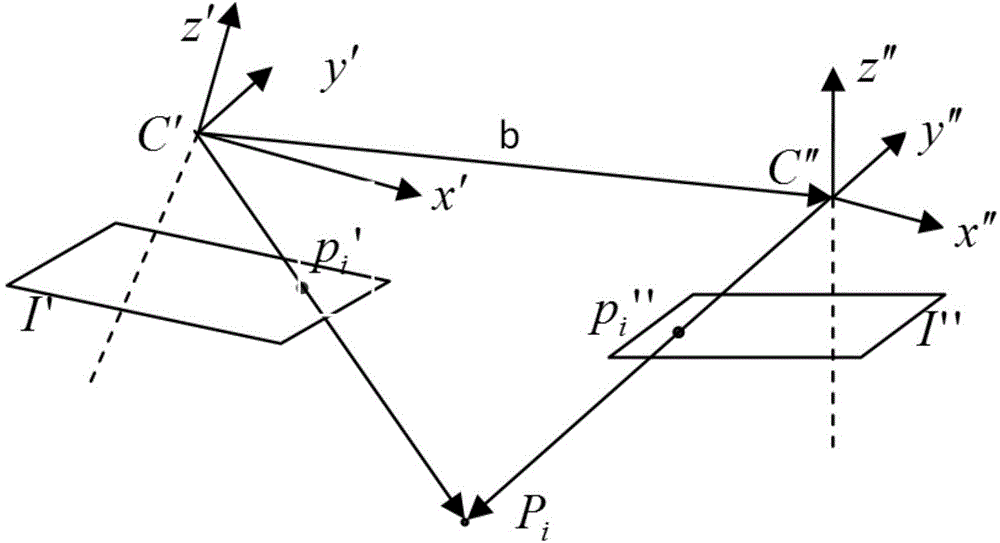
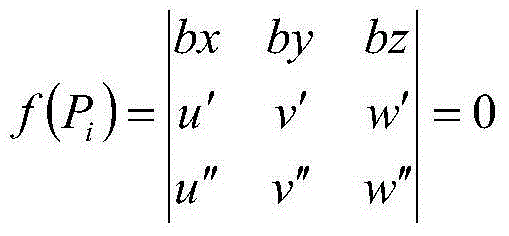
[0057] Step 2. Establish the coplanar equation of five points:
[0058] The specific method to establish the coplanar equation of a given point is as follows:
[0059] Such as figure 2 As shown, the first image I' taken may be called the left photo, the other image I" is called the right photo, and I' and I" are a pair; the five images on I' and I" Points with the same name are recorded as a set P, for P i The image point on I' is p i ', P i The image point on I″ is p i "; C'x'y'z' and C"x"y"z" are respectively the image space coordinate system of I' and I", C'(X s1 ,Y...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More