

Time-sensitive task dynamic allocation algorithm in battlefield environment for multiple unmanned aerial vehicles
A multi-UAV, dynamic allocation technology, applied in the direction of non-electric variable control, instrument, and target-finding control, etc., can solve the problems that affect the effect of UAVs on TST strikes, lack of task dynamic allocation capabilities, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0041] The present invention will be described in further detail below in conjunction with the accompanying drawings and specific embodiments.
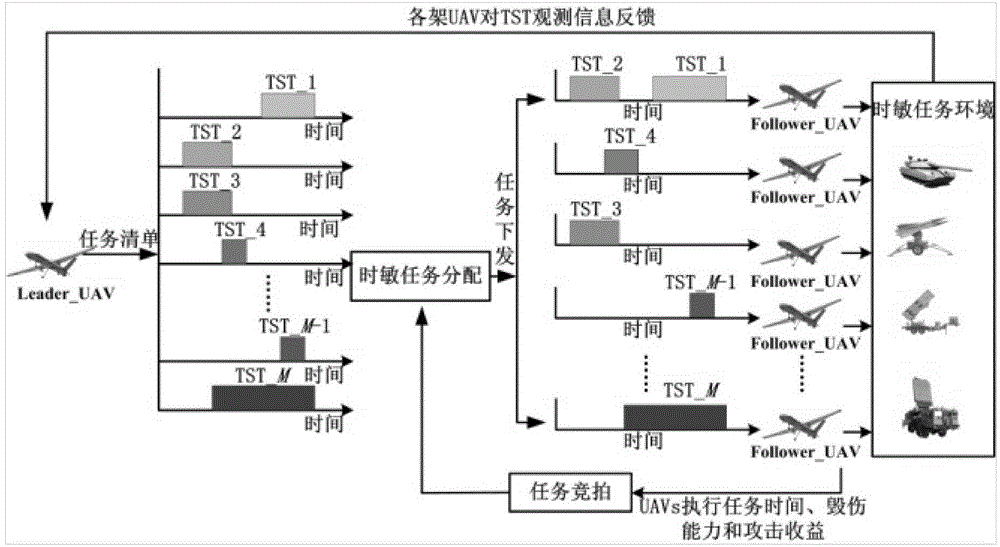
[0042] Depend on figure 1 The schematic diagram of the dynamic allocation of time-sensitive tasks in the UAVs formation shows that it is a dynamic allocation algorithm for multi-UAV time-sensitive tasks in a battlefield environment. The UAVs formation adopts the Leader-Follower structure to perform TST strike tasks. the role of the author. Leader_UAV will complete formation task allocation according to the change of time-sensitive tasks, as well as factors such as Follower_UAV execution time, damage capability and strike income. Based on the task assignment of Leader_UAV, Follower_UAV will complete the flight path planning and strike the TST according to the task content. Leader_UAV will act as the task auctioneer, and Follower_UAV will act as the bidder. Follower_UAV sends their own bidding price matrix cost_auction (including: dis...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More