

Method for rapidly generating finite time track of hypersonic aircraft
A hypersonic, finite-time technology, applied in the direction of instruments, adaptive control, control/regulation systems, etc., can solve the optimal control problem unsuitable for solving path constraints, trajectory optimization speed and real-time re-entry environment interference , Non-linear programming solutions and other problems cannot be guaranteed, to achieve the effect of solving closed-loop guidance problems, easy to use, and less memory occupation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
specific Embodiment approach 1
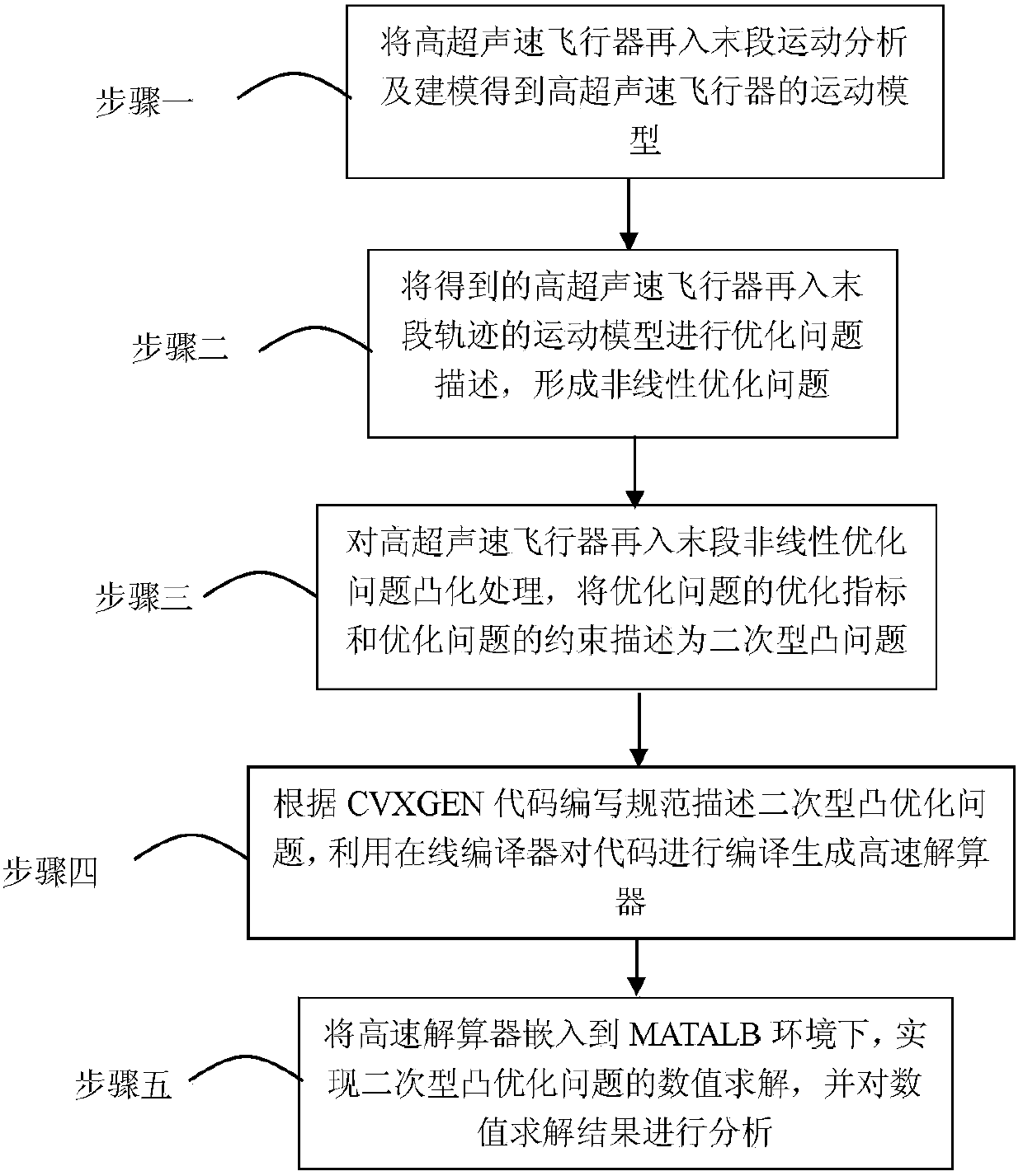
[0027] Specific Embodiment 1: The method for quickly generating a finite-time trajectory of a hypersonic vehicle according to this embodiment is specifically prepared according to the following steps:
[0028] Step 1: Analyze and model the motion of the hypersonic vehicle at the end of re-entry to obtain the motion model of the hypersonic vehicle as follows: Figure 5 ;
[0029] Step 2, describe the motion model of the obtained hypersonic vehicle re-entry terminal trajectory for optimization problem, and form a nonlinear optimization problem;
[0030] Step 3. Convex processing (discrete linearization) of the hypersonic vehicle re-entry terminal nonlinear optimization problem, describing the optimization index of the optimization problem and the constraints of the optimization problem as a quadratic convex problem;
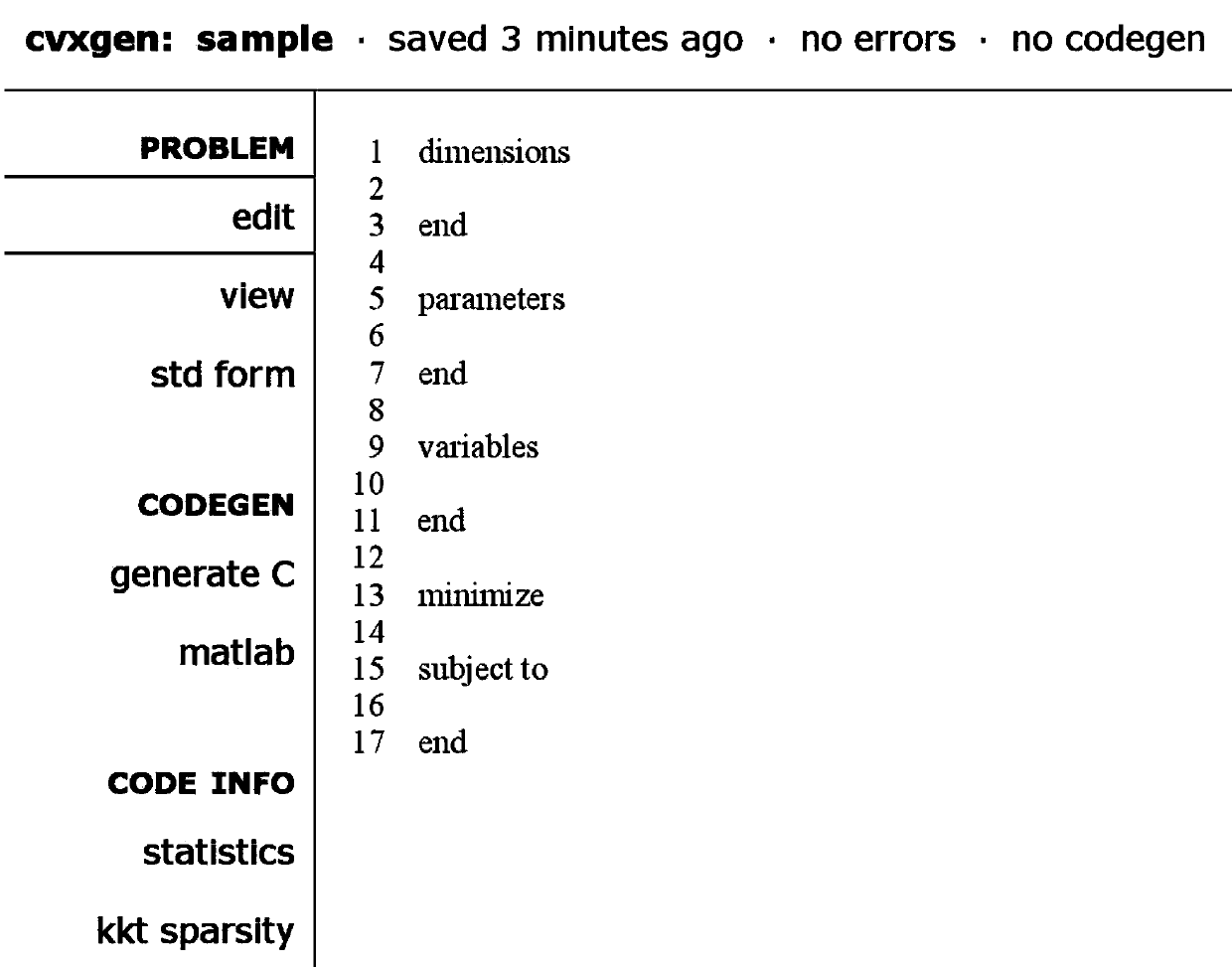
[0031] Step 4: Describe the quadratic convex optimization problem according to the CVXGEN code writing specification, and use the online compiler to compile the cod...
specific Embodiment approach 2
[0039] Specific embodiment 2: The difference between this embodiment and specific embodiment 1 is that the process of selecting the site of the borrow pit described in step 1 is as follows: in step 1, the motion of the hypersonic vehicle at the end of re-entry is modeled to obtain the hypersonic vehicle The specific process of the motion model is:
[0040] (1) The engine of the hypersonic vehicle re-entry process is stopped, no longer subject to thrust and control force, mainly subject to the effects of gravity and aerodynamic force, and carry out long-distance gliding; in addition, the present invention does not consider the movement of the aircraft around the center of mass, and considers that the orbiting The motion of the center of mass is in the state of instantaneous balance or trimming, and the aircraft is regarded as a mass point to study only the motion of its center of mass; simplified into the dynamic equation of the center of mass:
[0041] m ...
specific Embodiment approach 3
[0079] Specific embodiment three: the difference between this embodiment and specific embodiment one or two is that: the process of selecting the site of the borrow pit described in step one is: the motion model of the hypersonic vehicle re-entry terminal trajectory obtained in step two The specific process of describing the optimization problem and forming the nonlinear optimization problem is as follows:
[0080] (1) Express the hypersonic vehicle re-entry final stage motion model shown in (2) in the form of a differential equation:
[0081]
[0082] Among them, (3) is a nonlinear equation, that is, a state equation constraint, x=[r,γ,V,λ,φ,ψ] T is the state variable, u=[α,σ] T is the control quantity; this is the state equation constraint that must be satisfied during the optimization process; Indicates the real number field to which both the state variable and the control quantity belong; m represents the dimension of the control quantity, and n represents the dimens...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More