

Plane exploration method based on panoramic image depth map
A panoramic image and depth map technology, applied in the field of surface detection based on panoramic image depth map, can solve problems such as large-scale data production that is not suitable for automation, low accuracy, and failure to solve facade detection
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0042] Below in conjunction with accompanying drawing and embodiment the present invention will be further described:
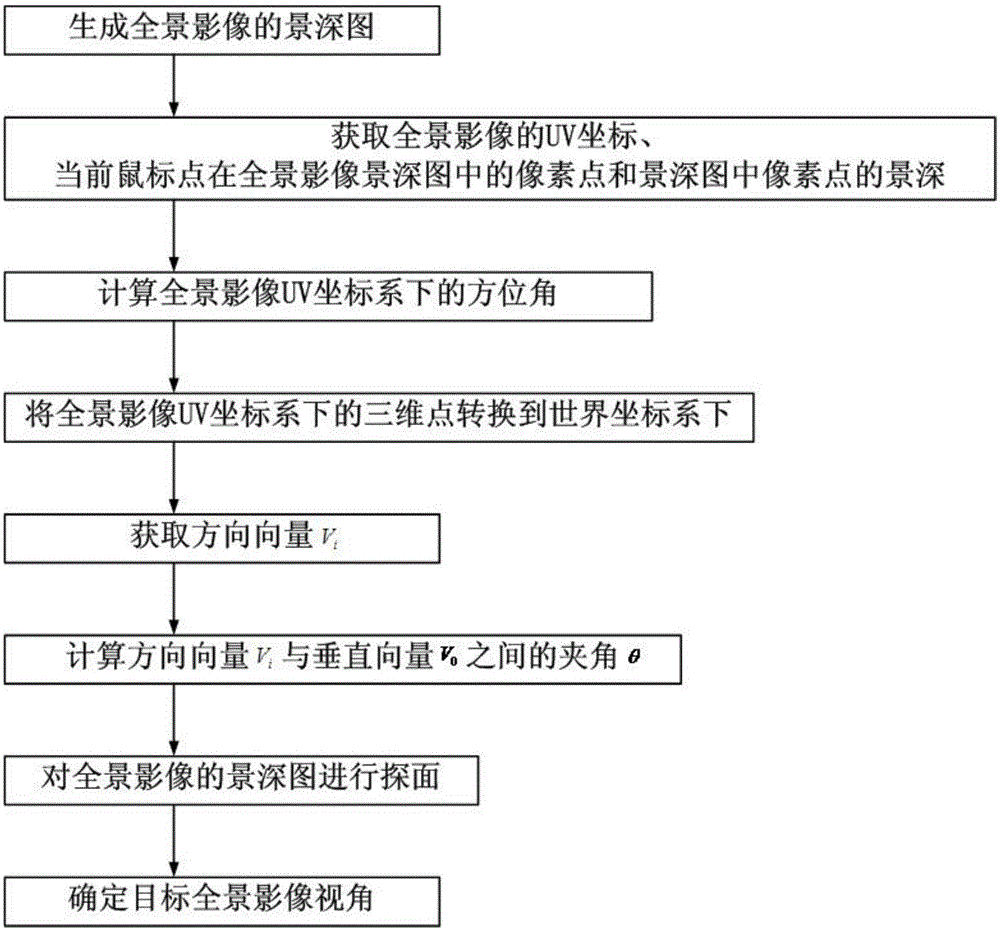
[0043] Such as figure 1 As shown in , a surface detection method based on the panoramic image depth map includes the following steps:
[0044] Step 1: Generate a depth map of the panoramic image.
[0045] Step 2, obtain the UV coordinates (u, v) of the current mouse point in the panoramic image, and calculate the pixel point (I, J) of the current mouse point in the panoramic image depth map, I=v(λW-1), J =(1-u)(λH-1), W and H are the width and height of the panorama image, and λ is the ratio of the width of the depth map to the width of the panorama; then obtain the pixel points (I, J ) depth of field L.
[0046] Step 3, calculate the azimuth (α, β) of the three-dimensional coordinate point p (x, y, z) in the panoramic coordinate system corresponding to the (I, J) pixel in the panoramic coordinate system, α=270-360u, β= 180v-90, α is the angle between the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More