

Real-time dynamic flight path planning method based on linear programming
A track planning, real-time dynamic technology, applied in navigation, surveying and mapping and navigation, navigation calculation tools, etc., can solve the problem that the track planning cannot be realized automatically
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] The embodiment of the present application provides a real-time dynamic track planning method based on linear programming, which solves the technical problem that track planning cannot be automatically realized in the prior art, and achieves the technical effect of automatically realizing track planning.
[0034] In order to solve the above-mentioned technical problems that cannot automatically realize track planning, the general idea is as follows:
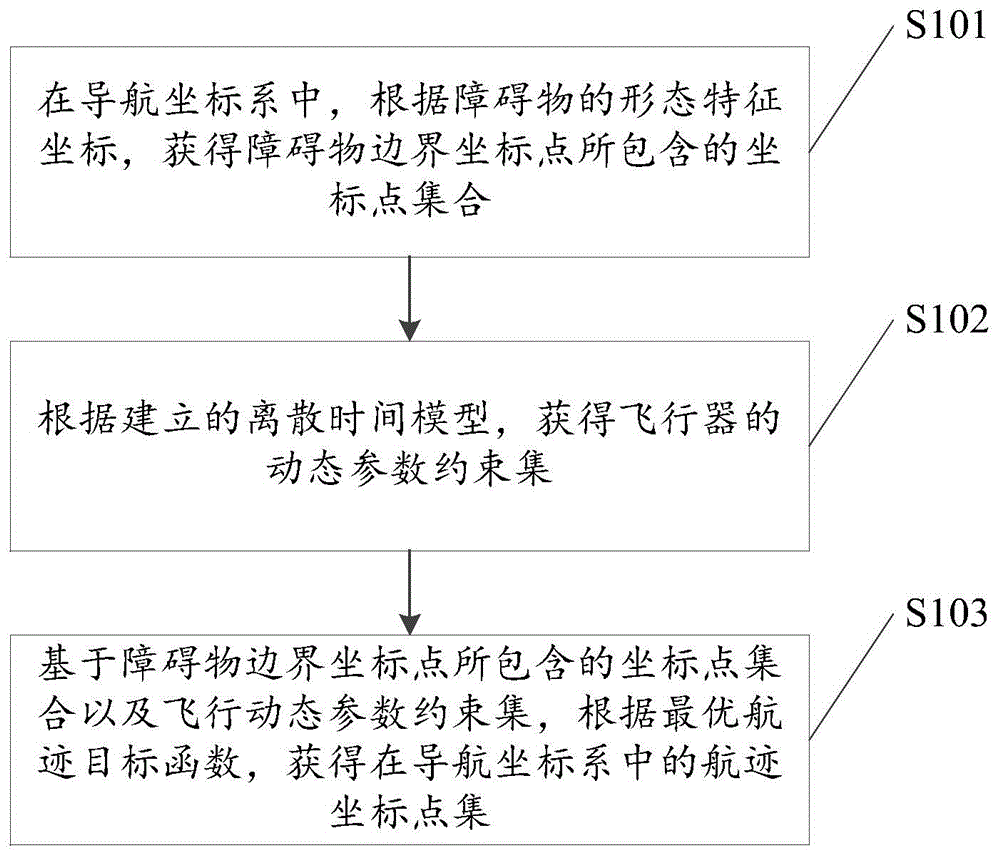
[0035] First, in the navigation coordinate system, according to the determined morphological feature coordinates of the obstacle, obtain the set of coordinate points contained in the boundary coordinates of the obstacle; then, according to the established discrete time model, obtain the dynamic parameter constraint set of the aircraft; finally, according to The set of coordinate points contained in the obstacle boundary coordinates obtained above, the dynamic parameter constraint set of the aircraft, and the optimal track ob...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More