

Parking system path planning method based on improved ant colony algorithm
A technology of ant colony algorithm and parking system, which is applied in the field of AGV path planning, which can solve the problems of falling into local optimal solution and slow convergence speed.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0063] In order to further demonstrate the purpose and advantages of the present invention, the present invention will be further described below in conjunction with the accompanying drawings and examples, but the present invention is not limited to this example.
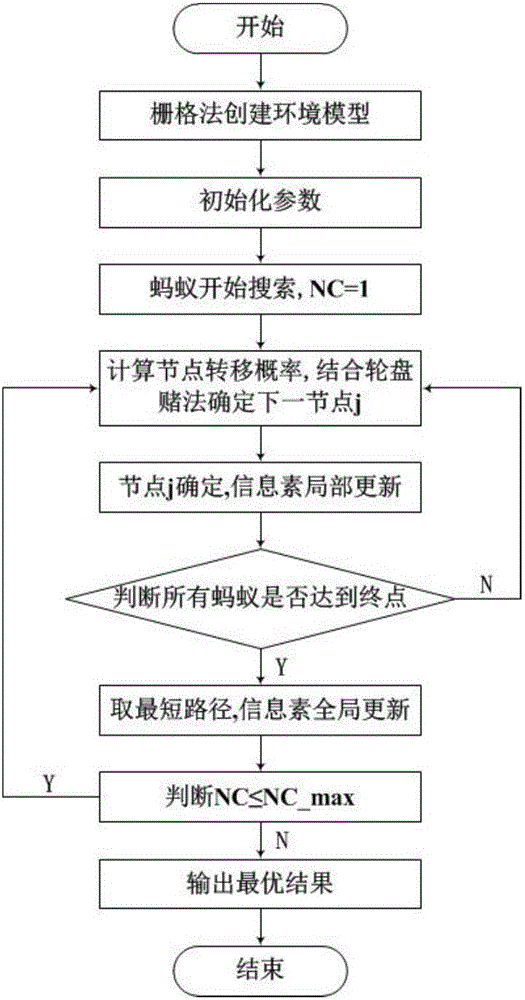
[0064] The invention provides a parking system path planning method based on the improved ant colony algorithm. attached figure 1 Shown is the flow chart of the implementation of the algorithm of the present invention, the flow chart describes the solution process of the optimal path, and the specific content includes the following steps:
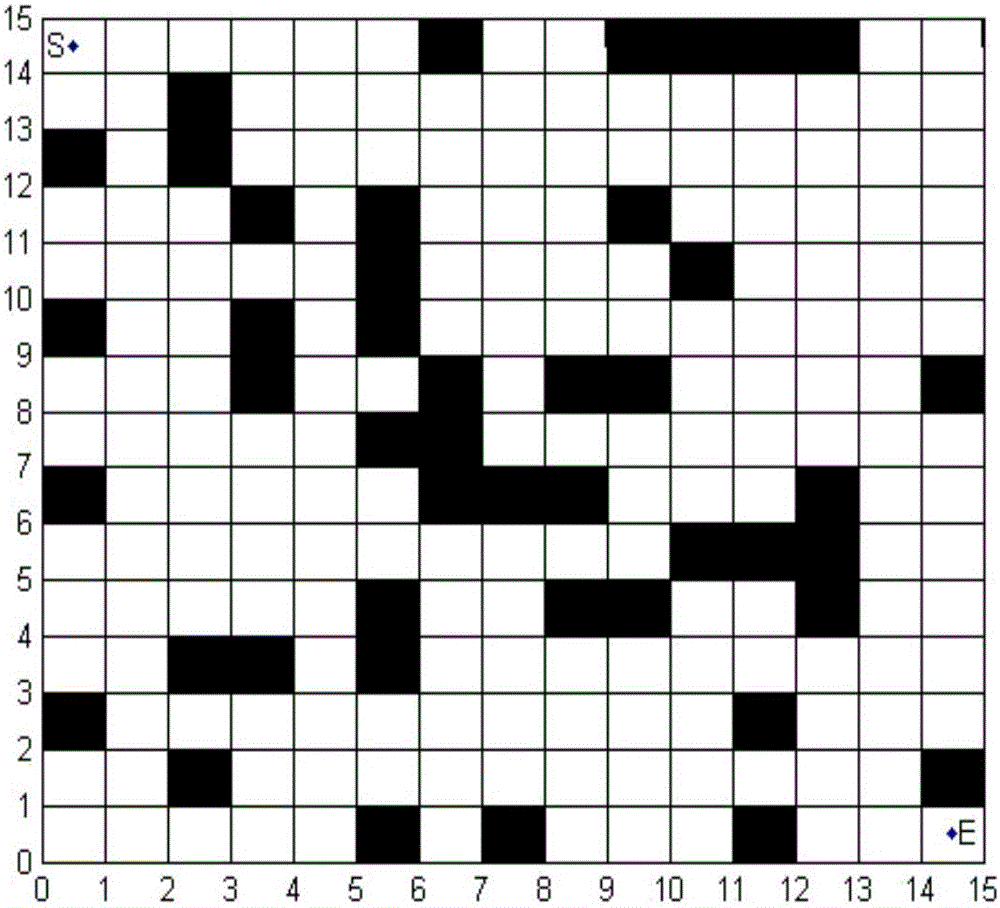
[0065] Step 1: Use the grid method to create the operating environment model of the AGV in the smart garage. The details are as follows:
[0066] 1-1): The AGV and the operating environment are treated as follows: (1) The AGV operating environment must be simplified into a two-dimensional limited space; (2) Assuming that the position of the obstacle in the operating environment ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More