

Path planning method of passable area divided at unequal distance
A technology of traffic area and path planning, which is applied in the directions of measuring devices, instruments, surveying and mapping, and navigation, etc., which can solve the problems of large time complexity and space complexity, and achieve the effect of improving time complexity and space complexity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] The specific embodiment of the present invention will be further described in conjunction with the accompanying drawings.
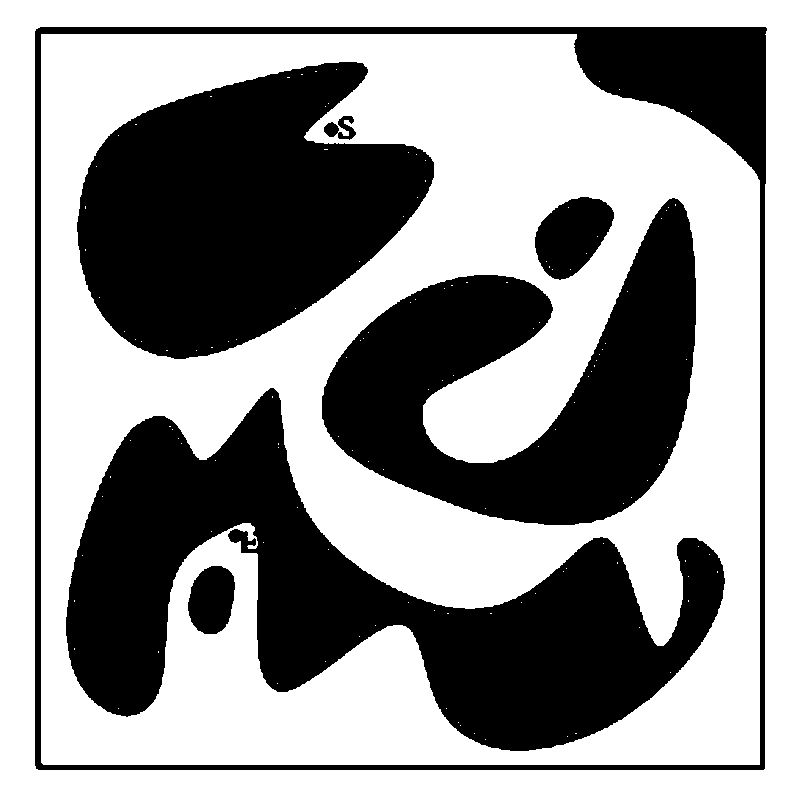
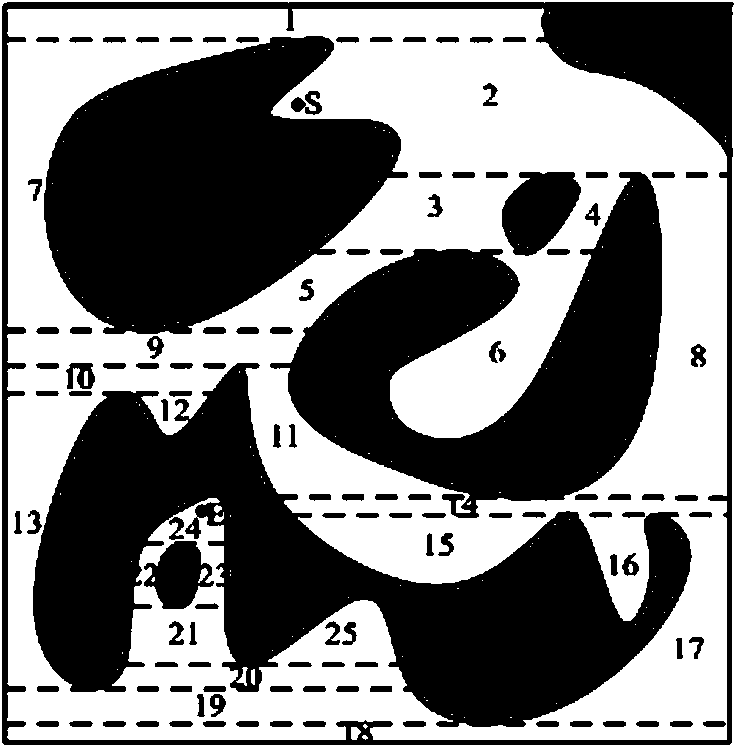
[0038] 1) Obstacle modeling
[0039] Since the outer edge of the obstacle is a continuous smooth curve, it can be simulated by using a fitting curve, using a Bezier curve. When drawing a Bezier curve, the position vector of the control point should be decomposed into two-dimensional plane x , y The component of the direction, the expression can be expressed as:
[0040] (Formula 1)
[0041] (Formula 2)
[0042] Formula 1 and Formula 2 are the horizontal and vertical coordinates on the fitting curve. in formula 1 x 0 , x 1 , x 2 , x 3是 The abscissa of the four input control points; similarly, in formula 2 y 0 , y 1 , y 2 , y 3 The ordinate of the corresponding control point. t is an incremental step size, with t The change of , can calculate the abscissa and ordinate of all the points that m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More