Device and method for tracking trajectory of linear motor based on improved auto-disturbance rejection controller
An active disturbance rejection controller, linear motor technology, applied in the direction of adaptive control, general control system, control/regulation system, etc. The effect of suppressing influence
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0050] The present invention will be further described below in conjunction with the accompanying drawings.
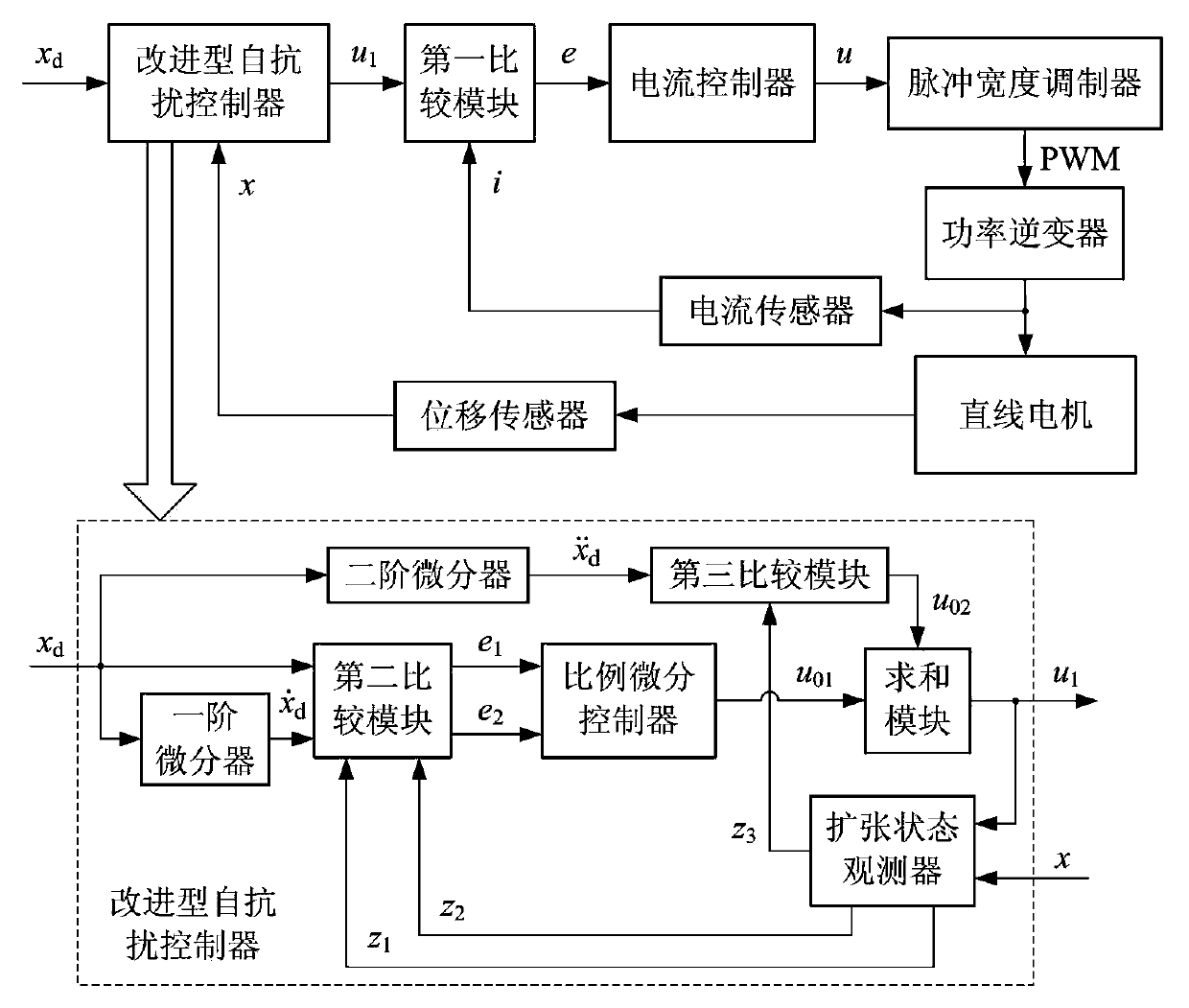
[0051] Such as figure 1 As shown, the linear motor trajectory tracking device based on the improved ADRC includes the improved ADRC, the first comparison module, the current controller, the pulse width modulator, the power inverter, the linear motor, the current sensor, displacement sensor.
[0052] The improved active disturbance rejection controller, the first comparison module, the current controller, the pulse width modulator, the power inverter, the linear motor, and the displacement sensor are sequentially connected, and the displacement sensor is connected with the improved active disturbance rejection controller The first comparison module is connected to the power inverter through a current sensor.
[0053] The improved ADRC controller includes a first-order differentiator, a second-order differentiator, a second comparison module, a third comparison module,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More