

Underwater robot control system based on mobile phone Bluetooth technology
An underwater robot and control system technology, applied in three-dimensional position/channel control and other directions, can solve the problems of inability to obtain underwater information and control the robot in real time, insufficient flexibility, etc., to enhance movement flexibility and avoid cable dragging , the effect of improving reliability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
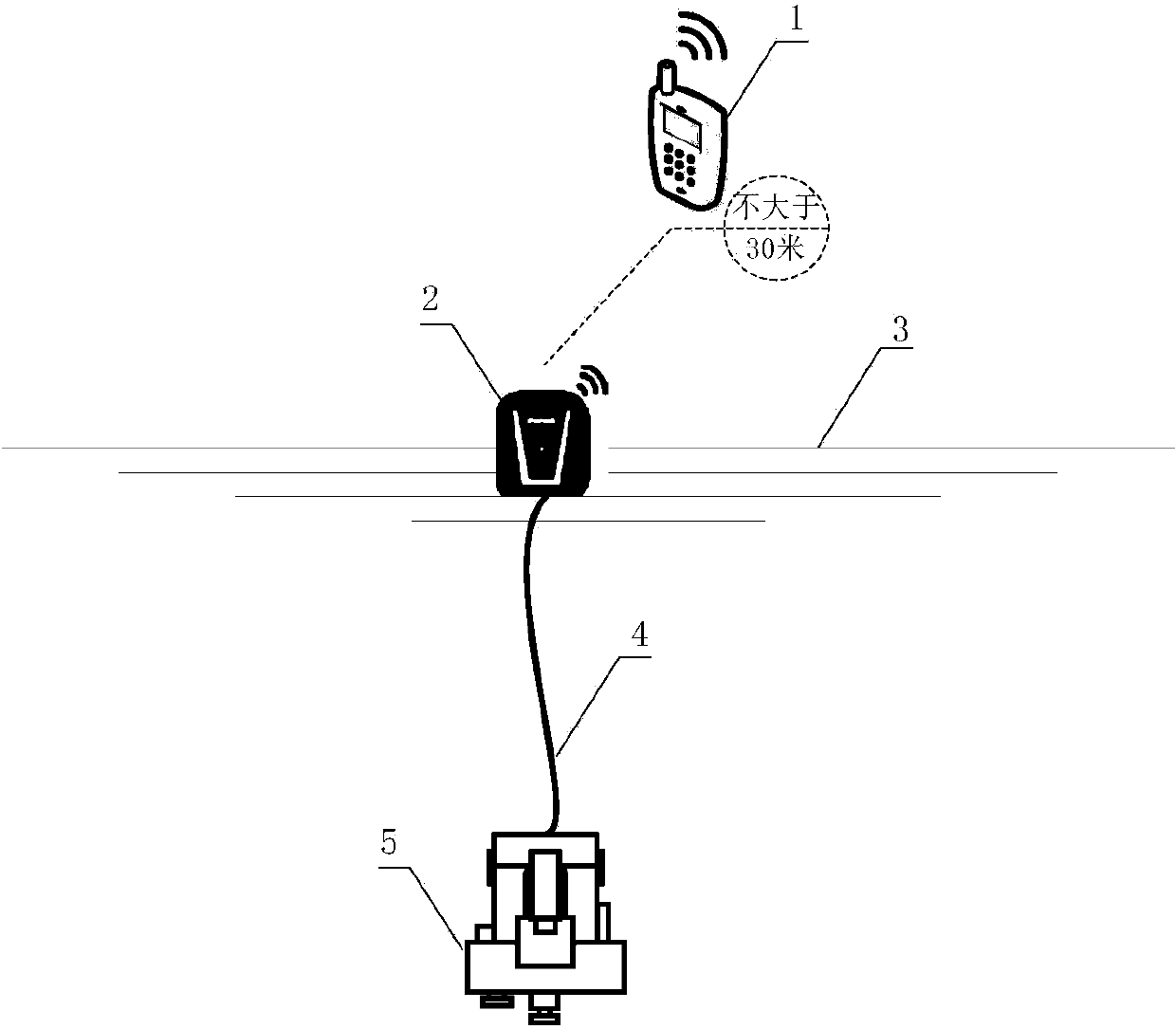
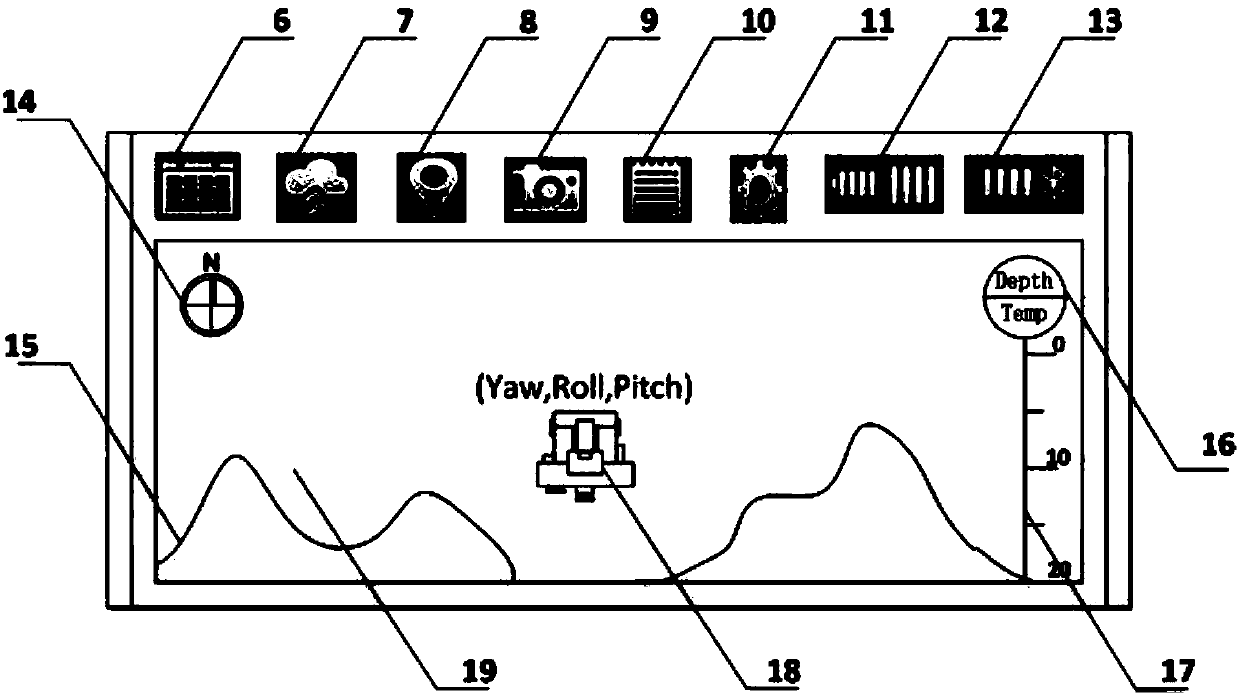
[0025] Such as figure 1 As shown, a kind of underwater robot control system based on mobile phone bluetooth technology in the present embodiment comprises: the processing system that is located in the underwater robot (5) carrier, the bluetooth device that is encapsulated in the buoy (2), on the mobile phone (1) The underwater robot control terminal; wherein the underwater robot control terminal on the mobile phone (1) communicates with the underwater robot (5) below the water surface (3) through the Bluetooth device encapsulated in the buoy (2), and the underwater robot ( 5) The buoy (2) is connected with the zero-buoyancy cable (4), and the underwater robot (5) is connected with the zero-buoyancy cable (4) with a water-tight connector to realize dry plugging. The distance between the buoy (2) and the mobile phone (1) is not more than 30 meters, which can be checked in actual operation image 3 Bluetooth status icon (13) on the main interface of the underwater robot control ...
Embodiment 2
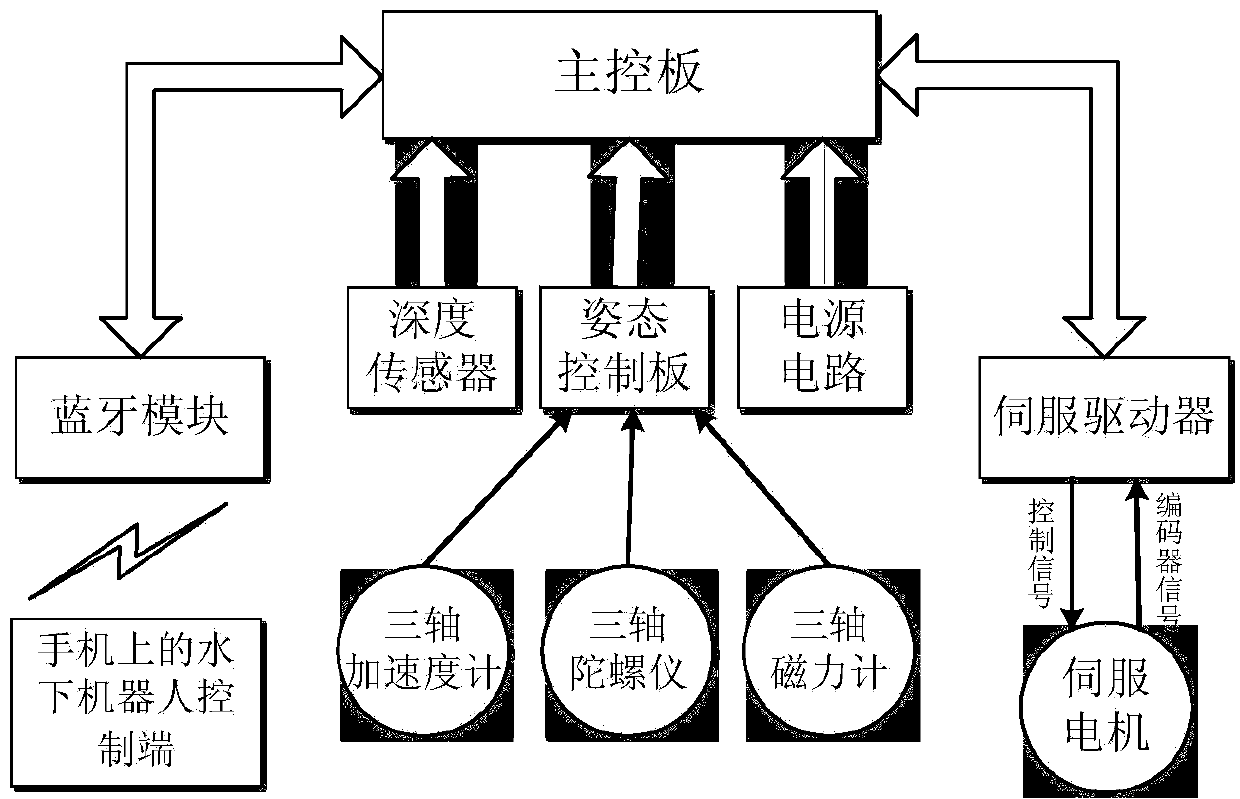
[0027] Such as figure 2 As shown, the processing system located in the carrier of the underwater robot (5) includes: a main control board, an attitude control board, a depth sensor, a power supply module, a propulsion module, etc., wherein: the main control board processor passes the serial port and the analog-to-digital conversion respectively The A / D obtains the attitude information and the depth signal calculated by the processor of the attitude control board.
[0028] Described main control board, as the control center of system, is made up of embedded microprocessor STM32F103VCT6 and peripheral circuit thereof, comprises: embedded microprocessor STM32F103VCT6, serial communication UART, analog-to-digital conversion A / D, input and output IO port, Power circuit, etc., wherein: the serial communication UART is connected to the Bluetooth module and the attitude control board in the buoy (2), the analog-to-digital conversion A / D is connected to the depth sensor, the input and...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More