Elastic caterpillar band capable of realizing telescopic deformation
A crawler and elastic technology, applied in the research field of crawler traveling mechanism, can solve the problems of different friction driving force, difficult processing, complex structure, etc., and achieve good ductility and retractability, good adaptability and scalability, and reliable expansion and contraction Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
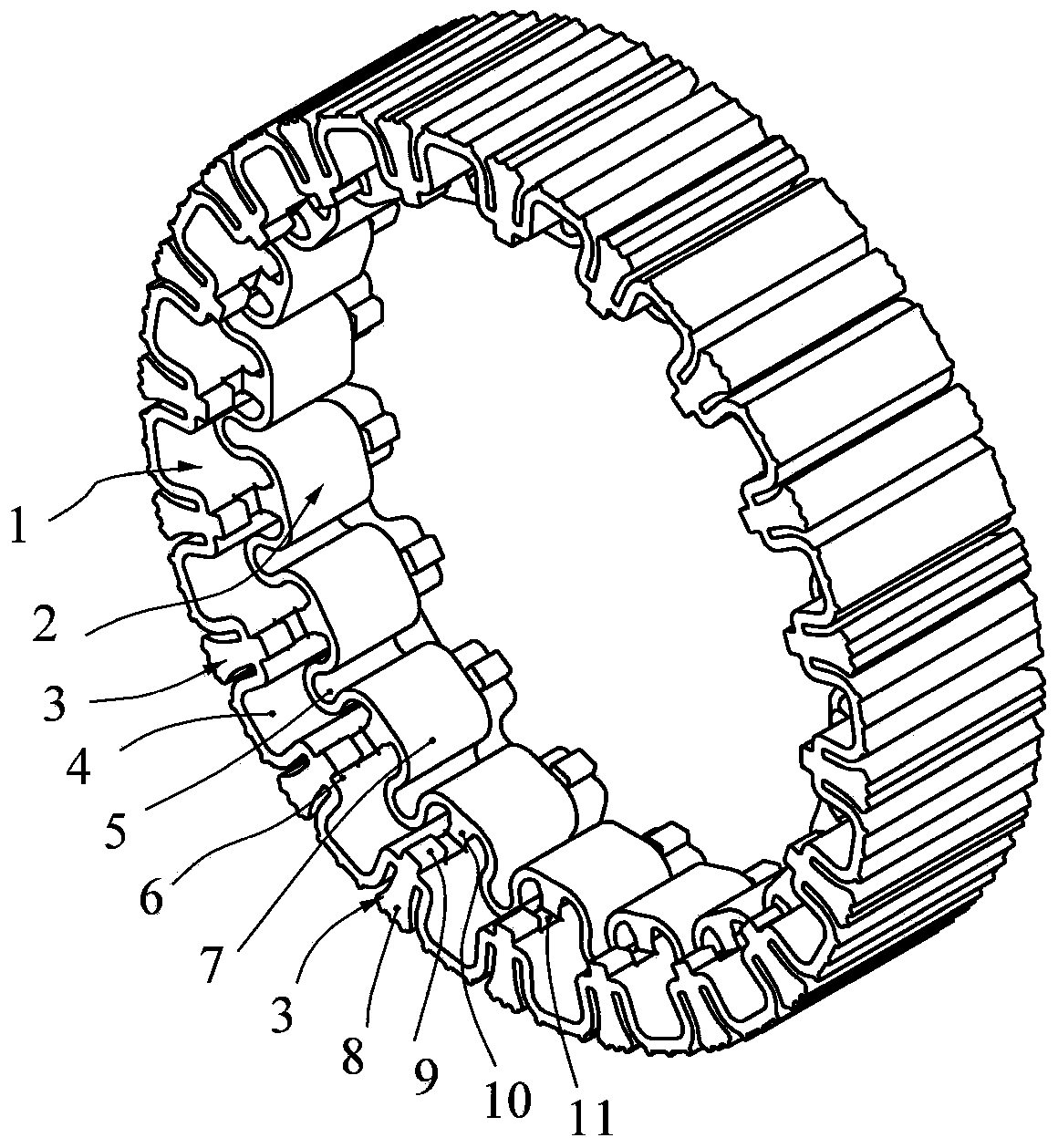
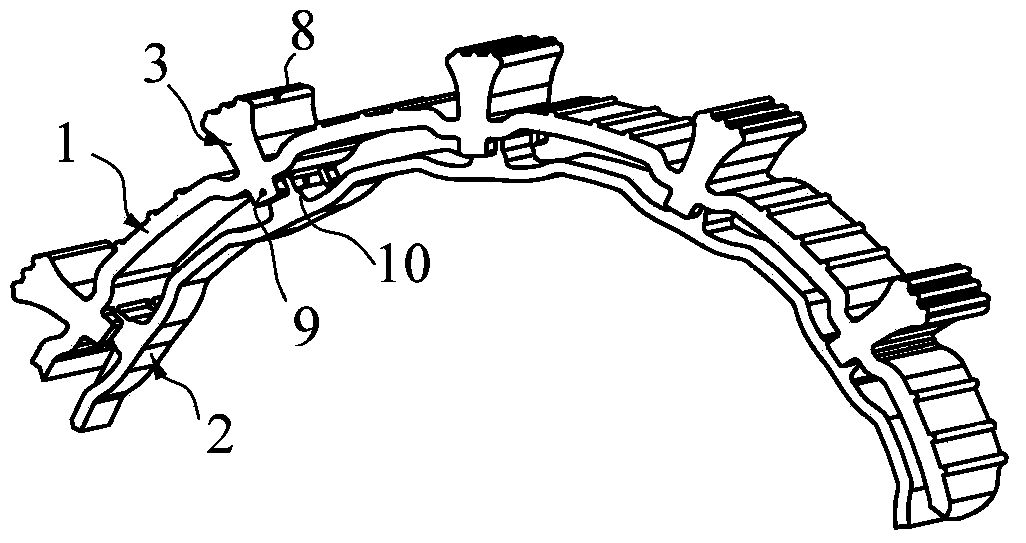
[0033] Refer to attached figure 1 , 2 , 3, 7, 8:
[0034] The technical solution adopted by the present invention to solve its technical problems is:
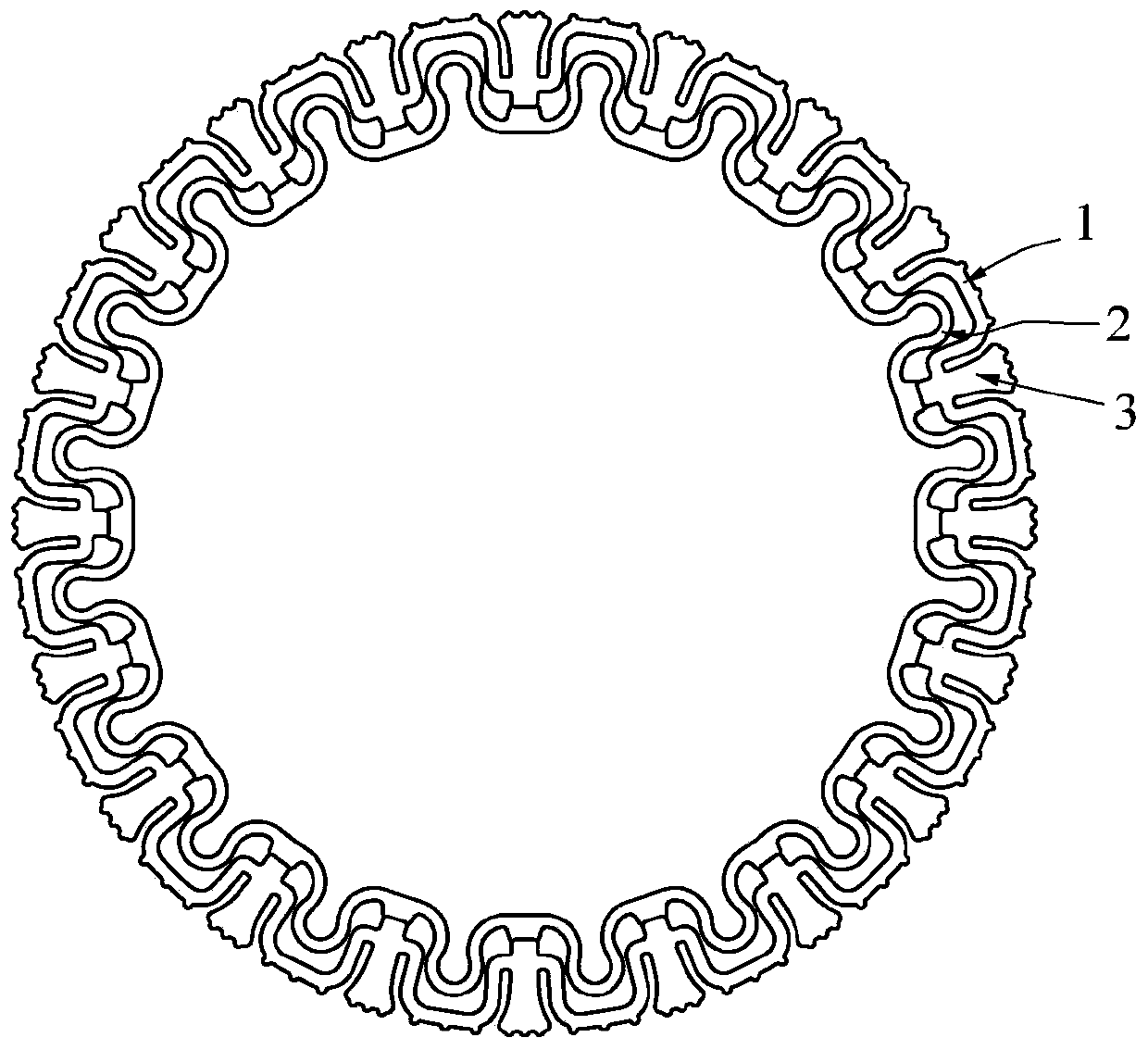
[0035] The stretchable and deformable elastic track includes the outer track 1, the inner track 2 and the connecting joint 3, which are integrally processed and formed by non-metallic elastic materials through a mold. The outer track 1 is a serpentine spring structure, and the whole is in a closed ring shape , its side end surface is wavy in the initial state; the inner crawler 2 is a serpentine spring structure, and the whole is in a closed ring shape, and its side end surface is wavy in the initial state; the inner crawler 2 and the outer crawler 1 are concave , the convex and curved sections are arranged at intervals, and the number of concave and convex bends of the two is the same, the width of the inner crawler 2 is smaller than the width of the outer crawler 1; the inner crawler 2 is set inside the outer crawler 1, and...
Embodiment 2
[0044] Refer to attached Figure 4 :
[0045] The present invention is integrally processed and shaped by a non-metallic elastic material through a mold, so the initial state of the present invention can be processed into different shapes, Figure 4 It is a perspective view of the second embodiment of the present invention whose initial state is a round rectangle. The structure of the second embodiment can refer to the first embodiment.
Embodiment 3
[0047] Refer to attached Figure 5 , 6 :
[0048] In the present embodiment three, a connecting support block 12 connecting the two is provided between the outer convex section 1 4 of the outer crawler belt 1 and the outer convex section 2 5 of the inner crawler belt 2, as Figure 5 shown. Adopt this technical scheme, when the present invention expands, as Image 6 As shown, the connection support block 12 between the outer crawler belt 1 and the inner crawler belt 2 makes the present invention have better support, making it more adaptable to uneven ground.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More