

Workpiece collaborative machining method and system and collaborative control method and device
A technology of workpiece and workpiece coordinates, applied in the direction of digital control, electrical program control, etc., can solve the problems that it is difficult to realize the synchronous control movement of mechanical unit A, the difficulty of motion trajectory, and the difficulty of interpolation, so as to achieve low interpolation difficulty and synchronization The effect of improved control movement and simple movement trajectory
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 approach
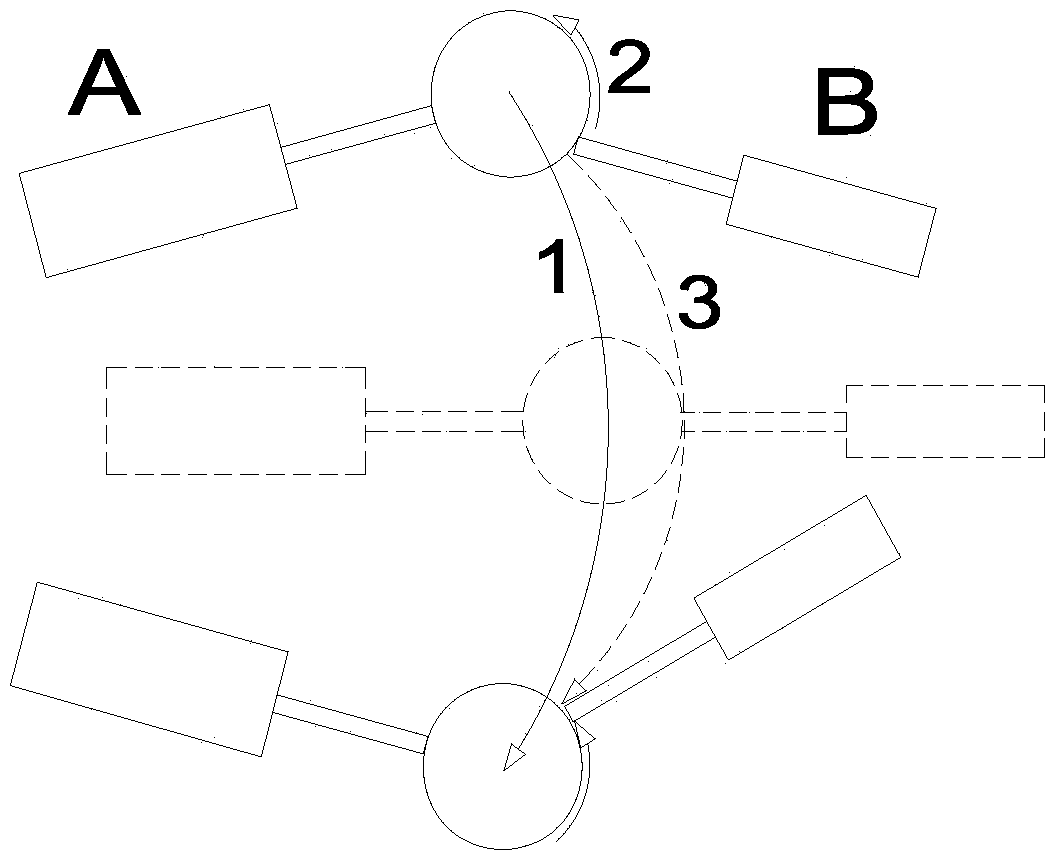
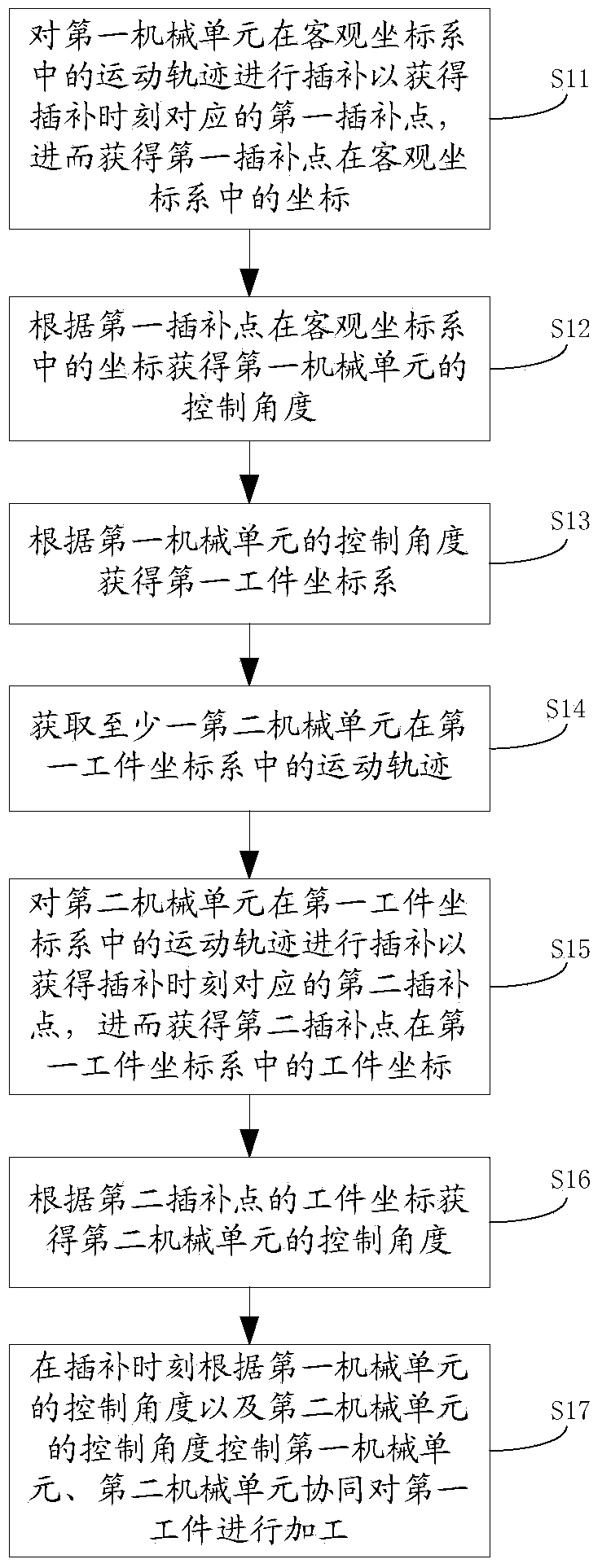
[0025] See figure 2 , The first embodiment of the collaborative processing method of the workpiece of the present invention includes:
[0026] Step S11: Interpolate the movement track of the first mechanical unit in the objective coordinate system to obtain the first interpolation point corresponding to the interpolation time, and then obtain the coordinates of the first interpolation point in the objective coordinate system.
[0027] Interpolate the motion track of the first mechanical unit in the objective coordinate system to obtain the first interpolation point corresponding to the interpolation time t, and then obtain the coordinates of the first interpolation point in the objective coordinate system. Interpolation is the process of obtaining the interpolation point located in the middle of the known point according to the interpolation algorithm according to some points on the motion trajectory. The interpolation point corresponding to the interpolation time t is the tool cen...
no. 2 approach
[0052] See Figure 4 , The second embodiment of the collaborative processing method of the workpiece of the present invention includes:
[0053] Step S21: Interpolate the movement track of the first mechanical unit in the objective coordinate system to obtain the first interpolation point corresponding to the interpolation time, and then obtain the coordinates of the first interpolation point in the objective coordinate system.
[0054] In this embodiment, the objective coordinate system is a coordinate system that is stationary with respect to the world coordinate system. Further, the coordinate system that is stationary with respect to the world coordinate system is specifically a workpiece coordinate system that is stationary with respect to the world coordinate system.
[0055] Step S22: Obtain the control angle of the first mechanical unit according to the coordinates of the first interpolation point in the objective coordinate system.
[0056] In this embodiment, the coordinates ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More