

Method for controlling position of self-adaptive robust of motor servo system based on extended state observer
An adaptive robust, servo system technology, applied in the direction of adaptive control, general control system, control/adjustment system, etc., can solve the problems of model uncertainty, jitter high-gain feedback, etc., to achieve good robustness, control Output smooth and continuous effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] In order to better understand the technical content of the present invention, specific embodiments are described as follows with the accompanying drawings.
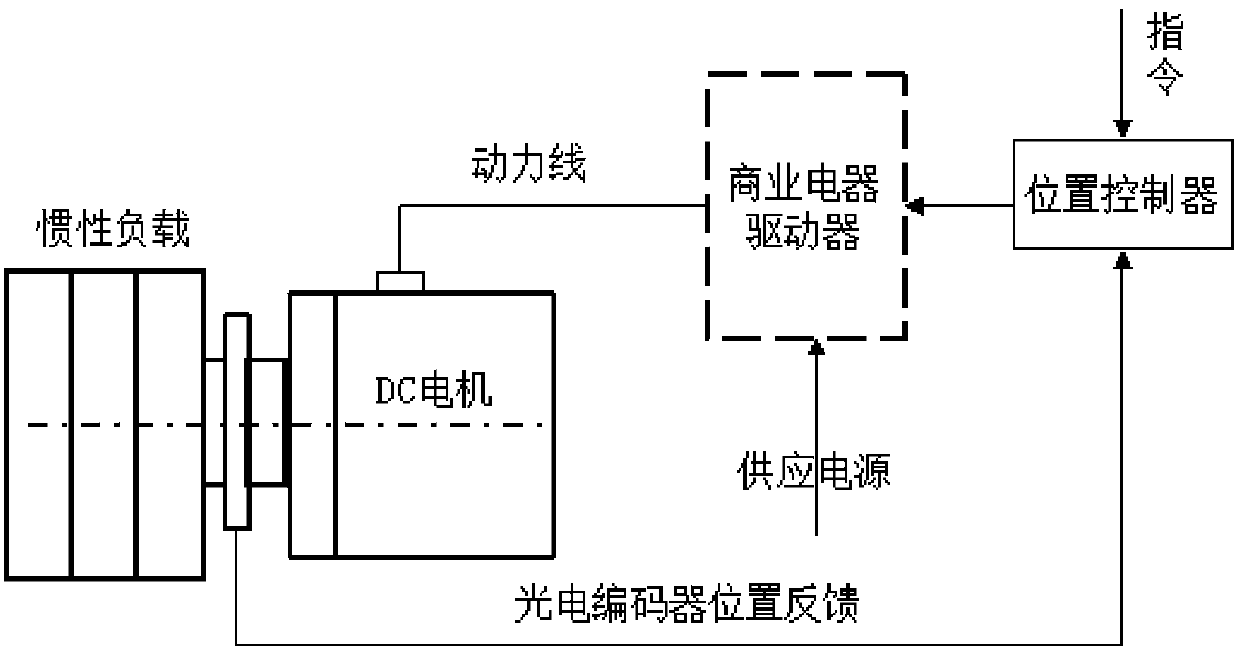
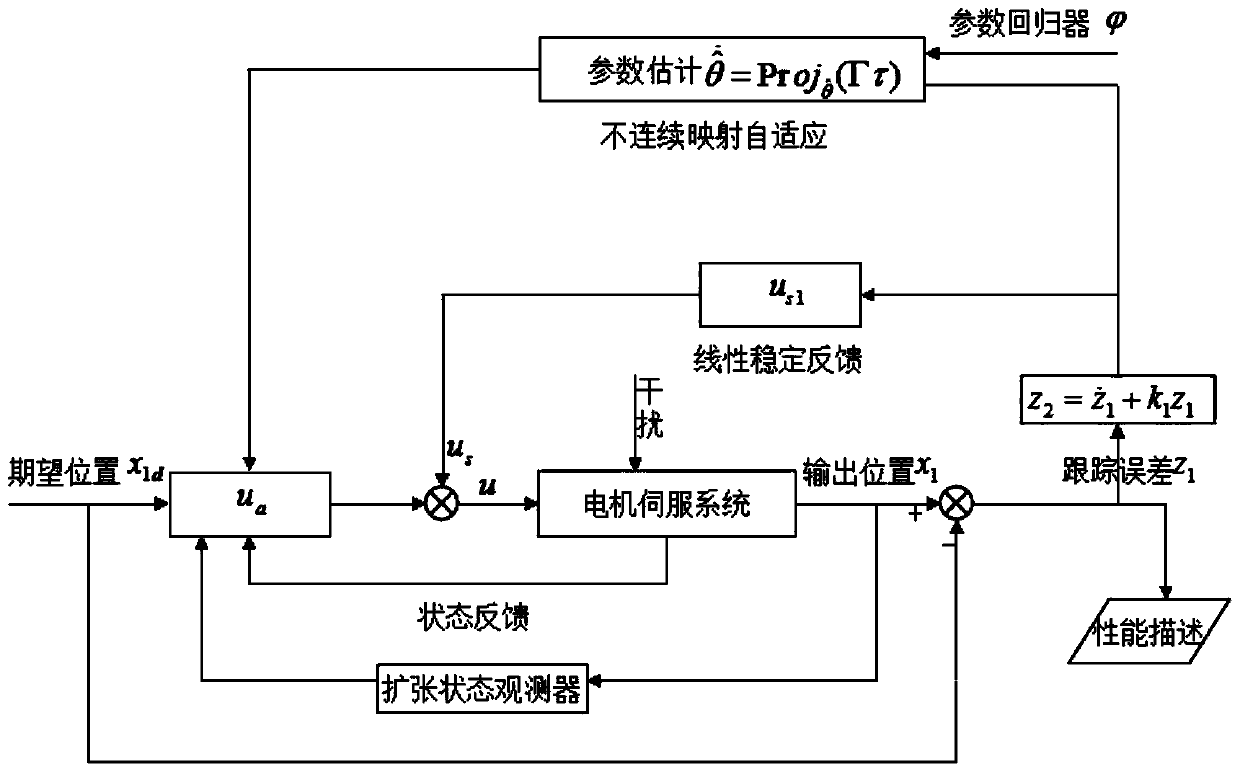
[0032] Such as figure 1 , figure 2 As shown, according to a preferred embodiment of the present invention, an adaptive robust position control method for a motor servo system based on an extended state observer is characterized in that it includes the following steps:
[0033] Step 1. Establish a mathematical model of the motor servo system;
[0034] Step 2. Configure the adaptive law to estimate the uncertainty parameters in the motor servo system;
[0035] Step 3. Configure the extended state observer to estimate the uncertainty of the motor servo system;
[0036] Step 4. Configure an adaptive robust position controller for the motor servo system based on the extended state observer; and
[0037] Step 5. Determine the relevant parameters and functions in the motor servo system so that the position output of the motor servo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More