

Accurate visual positioning and orienting method for rotor wing unmanned aerial vehicle
An unmanned and visual positioning technology for rotors, applied in three-dimensional position/channel control and other directions, can solve problems such as difficult implementation, low measurement accuracy, and temperature drift, and achieve the effect of flexibility and convenience, simple calculation, and collision prevention.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0048] Taking the application of the precise visual positioning and orientation method of the rotor UAV to the power inspection of the small multi-rotor UAV as an example, the working process is as follows:
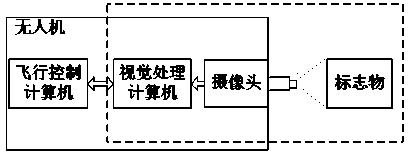
[0049] The small multi-rotor UAV for inspection includes flight control computer, visual processing computer, positioning and orientation camera, frame, propeller, motor and ESC, remote control receiver, battery, micro-single camera for inspection and supporting PTZ, image transmission and other parts. The ground part includes: image transmission receiver, ground station, flight control remote control, camera control and PTZ control remote control. like figure 1 As shown, the UAV is equipped with a camera and a vision processing computer, and the vision processing computer and the flight control computer are connected through a stable bus. The camera lens is pointing straight down.
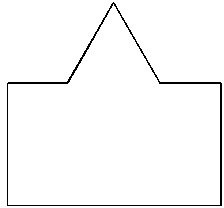
[0050] Selected marker. Since the marker needs to be installed horizontally in this c...
Embodiment 2
[0060] Taking the application of the precise visual positioning and orientation method of the rotor UAV to the insulator detection of the transmission tower of the small multi-rotor UAV as an example, the working process is as follows:
[0061] Insulator detection of transmission towers is an important part of power inspection. High-voltage transmission towers are usually equipped with two-circuit three-phase cables, and insulators are located near the tower for each cable. The method of the present invention can help the unmanned aerial vehicle to detect the multiphase insulators on the same iron tower safely, quickly and autonomously.
[0062] The composition of the small multi-rotor UAV and the devices involved in the precise visual positioning and orientation method of the rotor UAV are basically the same as those in the first embodiment. The only difference is that the camera lens for vision processing is mounted horizontally forward.
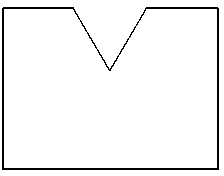
[0063] Selected marker. like F...
Embodiment 3
[0072] Take the application of the precise visual positioning and orientation device and method of the rotary-wing UAV to the building anti-terrorism of the small multi-rotor UAV as an example. The composition of the small multi-rotor UAV used includes: flight control computer, visual processing computer, positioning and orientation camera, frame, propeller, motor and ESC, remote control receiver, battery, monitoring camera, image transmission and other parts. The ground part includes: image transmission receiver, ground station, remote controller for flight control, camera for monitoring and remote controller for PTZ control.
[0073]When a hostage takes place in a window room of a high-rise building, real-time monitoring of the window will be critical. At this time, the fixed-point hovering of the rotary-wing drone, and the real-time aerial photography solution is usually clearer than that of setting up a camera in a nearby building or the ground, and the fixed point is conv...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More