Unlock instant, AI-driven research and patent intelligence for your innovation.
Clamping force deflecting increment progressively decreasing determination algorithm
What is Al technical title?
Al technical title is built by PatSnap Al team. It summarizes the technical point description of the patent document.
A technology of clamping force and algorithm, applied in computing, special data processing applications, instruments, etc., can solve problems such as being easily affected by initial values
Active Publication Date: 2015-01-21
NANCHANG HANGKONG UNIVERSITY
View PDF3 Cites 2 Cited by
Summary
Abstract
Description
Claims
Application Information
AI Technical Summary
This helps you quickly interpret patents by identifying the three key elements:
Problems solved by technology
Method used
Benefits of technology
Problems solved by technology
However, in the process of solving the rigid body model, whether it is constrained nonlinear programming or "ε-constrained" method, it is easily affected by the initial value, and this method is only suitable for workpieces with regular shapes
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View more
Image
Smart Image Click on the blue labels to locate them in the text.
Viewing Examples
Smart Image
Click on the blue label to locate the original text in one second.
Reading with bidirectional positioning of images and text.
Smart Image
Examples
Experimental program
Comparison scheme
Effect test
example 1
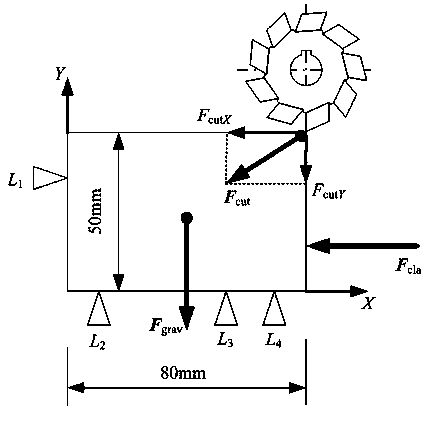
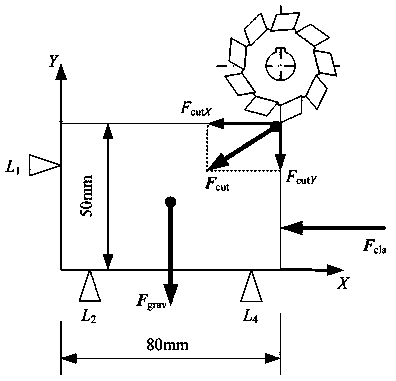
[0054] Assume that the relationship between the fixture and the workpiece is in an ideal state, and it is two-dimensional, such as figure 1 As shown, the workpiece with a size of 80mm×50mm is controlled by the positioning element L 1 , L 2 , L 3 and L 4 to locate. During milling, the workpiece is at the machining position r cut =[80mm,50mm] The cutting force at T is F cut =[-850N,-50N]T. The position and unit normal vector of each positioning element are shown in Table 1.
[0055] Table 1 Position and orientation of positioning components
[0056] positioning element Coordinates (mm) Inner normal vector L1 [0,40] T [1,0] T
[0057] L2 [10,0] T [0,1] T L3 [50,0] T [0,1] T L4 [70,0] T [0,1] T
[0058] In consideration of processing requirements and production safety, clamping force Fcla is applied at rcla=[80mm, 20mm]T. The gravity of the workpiece itself is Fgrav=[0,-150N]T, and the center of gravity is rgrav=...
example 2
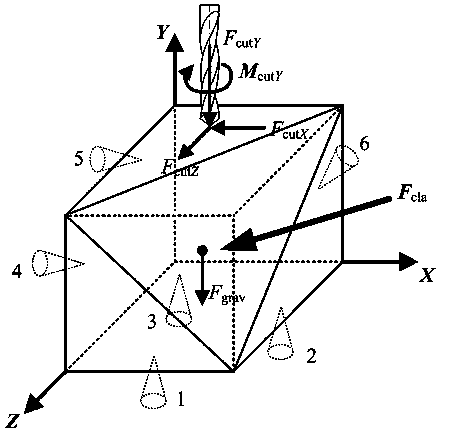
[0085] image 3 for r on top of workpiece cut = [50mm, 100mm, 30mm] T Schematic diagram of the drilling process. The workpiece size is 100mm×100mm×100mm, and the cutting load is F cutX =85N,F cutY =2000N,F cutZ =50N, M cutY = 4500 N·mm. The workpiece is positioned by six positioning elements according to the "3-2-1" method, and the position and unit normal vector of each positioning element are shown in Table 4. f cla is the clamping force, the point of action is r cla =[70mm,40mm,90mm]T, the normal vector is The workpiece weight is F grav =50N, center of gravity is r grav =[40mm, 40mm, 40mm]T.
[0086] Table 4 Position and direction of positioning components
[0087] positioning element Coordinates (mm) unit normal vector 1 [40,0,80] T [0,1,0] T 2 [80,0,40] T [0,1,0] T 3 [20,0,20] T [0,1,0] T 4 [0,50,80] T [1,0,0] T 5 [0,50,20] T [1,0,0] T 6 [80,50,0] T [0,0,1] T
[0088] According to the process...
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
PUM
Login to View More
Abstract
The invention discloses a clamping force deflecting increment progressively decreasing determination algorithm. The clamping force deflecting increment progressively decreasing determination algorithm comprises the following steps of judging the existence of a first interval value; calculating a first interval value of force; judging the existence of a second interval value; determining a second interval value of the force. According to the clamping force deflecting increment progressively decreasing determination algorithm, involved calculations convert a continuous type clamping force design problem to be a discrete type, a computer is beneficial to achievement of automatic design of the clamping force, the algorithm is suitable for complex-shaped workpieces, and a basic theory is provided for research and development of a practical computer auxiliary clamp design.
Description
technical field [0001] The invention belongs to the field of fixture design and is used for a workpiece clamping device of a metalprocessingcutting fixture, in particular to an algorithm for determining the increment and decrement of clamping force direction change. Background technique [0002] During processing, the workpiece will be subjected to external forces such as cutting force and cutting torque, and the fixture must provide a suitable clamping force to ensure that the workpiece is always in contact with the positioning element. The clamping force directly affects the clamping reliability, clamping deformation, positioning accuracy and machining accuracy of the workpiece. Therefore, the determination of the clamping force is a very important task in the fixture design process. [0003] In actual operation, the determination of the clamping force generally depends on the personal experience and intuition of the fixture designer, which is highly random and lacks th...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
Application Information
Patent Timeline
Application Date:The date an application was filed.
Publication Date:The date a patent or application was officially published.
First Publication Date:The earliest publication date of a patent with the same application number.
Issue Date:Publication date of the patent grant document.
PCT Entry Date:The Entry date of PCT National Phase.
Estimated Expiry Date:The statutory expiry date of a patent right according to the Patent Law, and it is the longest term of protection that the patent right can achieve without the termination of the patent right due to other reasons(Term extension factor has been taken into account ).
Invalid Date:Actual expiry date is based on effective date or publication date of legal transaction data of invalid patent.



 Login to View More
Login to View More  Login to View More
Login to View More