

A purely mechanical wearable finger prosthesis with multiple degrees of freedom
A finger prosthesis, a purely mechanical technology, applied in the field of purely mechanical wearable finger prosthetics, can solve problems such as the inability to realize complex movements, achieve rapid processing and use, reduce the complexity of the device, and not easily collide with each other
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0043] The present invention will be described in detail below with reference to the accompanying drawings and examples.
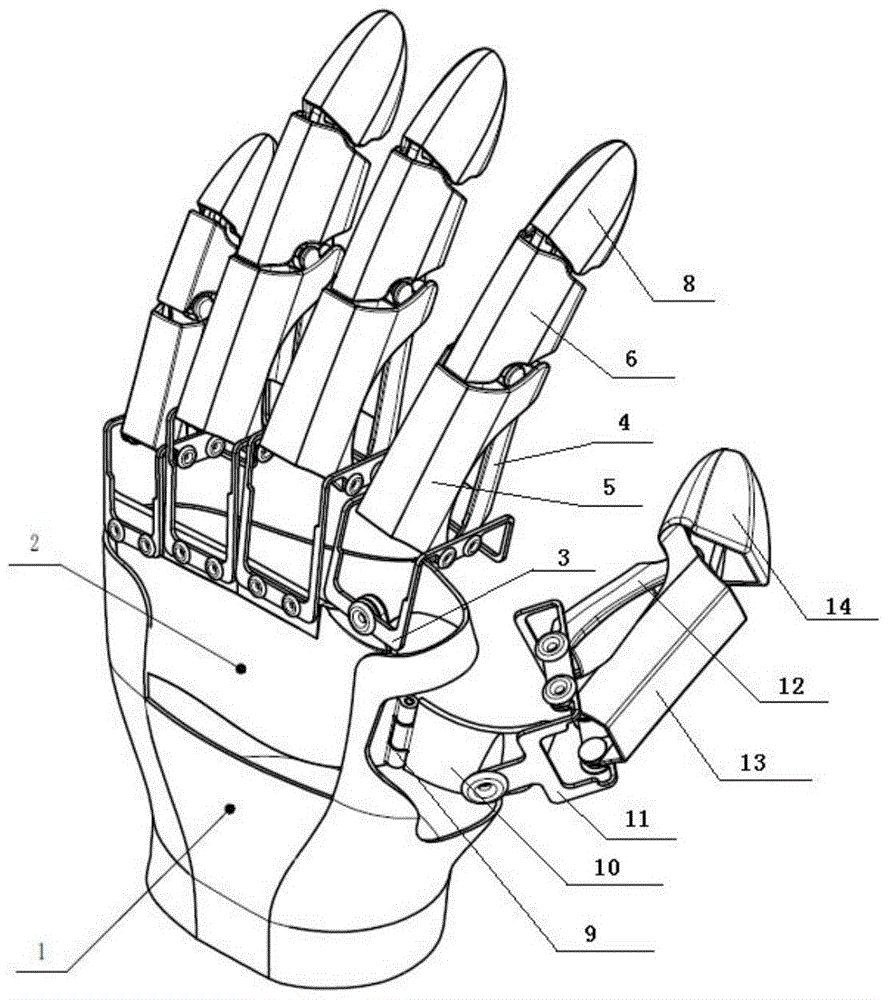
[0044] See attached figure 1 , the present invention provides a purely mechanical wearable finger prosthesis with multiple degrees of freedom, including: palm part, index finger cot, thumb cot, middle finger cot, ring finger cot, little finger cot;
[0045] Described palm part comprises: palm 1, palm support 2;
[0046] See attached figure 2 , 3 , 4. The index finger cot includes: index finger frame 3, index finger proximal knuckle half set 4, index finger middle knuckle connecting half set 5, index finger middle knuckle 6, index finger far knuckle connecting rod 7, index finger far knuckle 8;
[0047] See attached Figure 5 , the thumb cot includes: inner bias pin 9, inner bias plate 10, thumb frame 11, thumb proximal knuckle half set 12, thumb far knuckle connection half set 13, thumb far knuckle 14 ;
[0048] See attached Image 6 , the structur...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More