

Robot system and map updating method
A robot system and mobile robot technology, applied in the field of robot system and map update, can solve problems such as errors and error accumulation, and achieve the effect that the accuracy will not be reduced
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
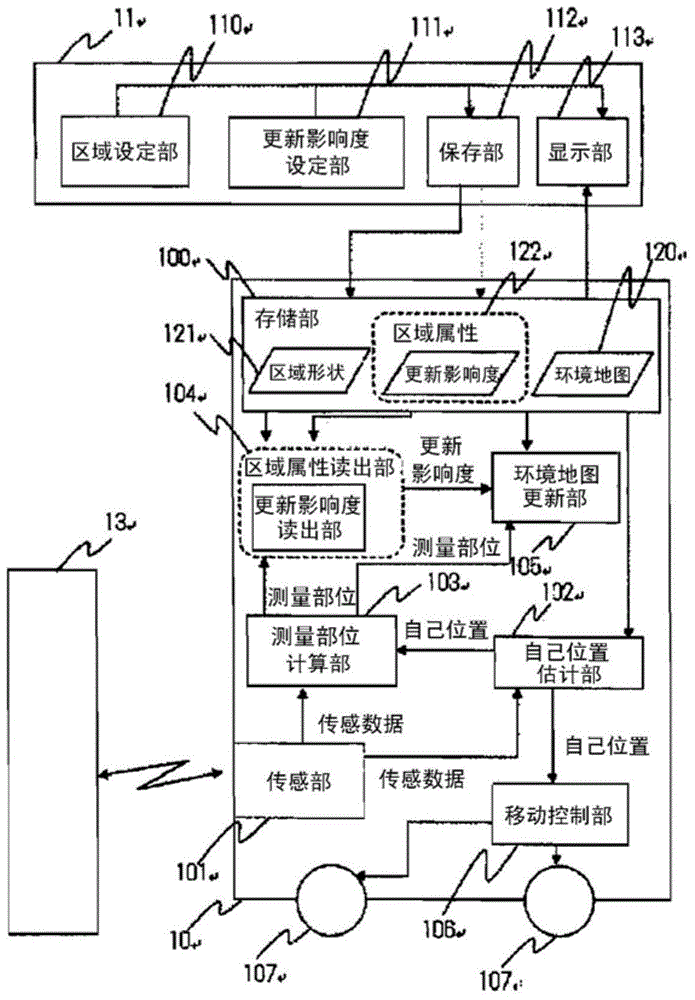
[0042] figure 1 is a conceptual diagram showing the robot system of this embodiment. First, the robot system of the present invention is composed of a mobile robot 10 and an area setting device 11 . The mobile robot 10 has an environment map 120 representing the shapes of objects existing in space, a storage unit 100 that stores a plurality of pairs of area shapes 121 and area attributes 122, a sensor unit 101 that measures surrounding shapes, and a self-position estimation unit. 102. Measurement location calculation unit 103, area attribute reading unit 104, environment map update unit 105, movement control unit 106 and movement mechanism unit 107 that determine the direction and amount of movement based on the position of the robot.
[0043] In addition, in this embodiment, the area attribute 122 indicates an update influence degree which is an influence degree on the environment map at the time of updating, and the area attribute reading unit 104 reads the update influenc...
Embodiment 2
[0075] In the above-described embodiment, a distance sensor for measuring an object existing on a two-dimensional plane has been used as the sensor unit 101 . On the other hand, a distance sensor capable of measuring a three-dimensional shape may be used as the sensor unit 101 . Next, an example using a three-dimensional distance sensor will be described.
[0076] In the case of processing a three-dimensional space, when the space is divided into grids, a huge amount of memory is used. Therefore, a collection of measured points (point group) measured by the distance sensor is directly held in the storage unit 100 . Of course, when a computer equipped with a large number of storage media can be used, grids can also be processed as in the above-described embodiment.
[0077] The sequence of functions / processes mounted on the mobile robot is the same as in the above-described embodiments. Each function is explained below.
[0078] In this method, objects in space are represen...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More