

Strong tracking Kalman filer method for target tracking
A Kalman filtering and target tracking technology, applied in the field of target tracking, which can solve the problems of inaccurate noise statistical characteristics, weak ability to suddenly change the target state, and volumetric Kalman filtering algorithm to deal with inaccurate models.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0045] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
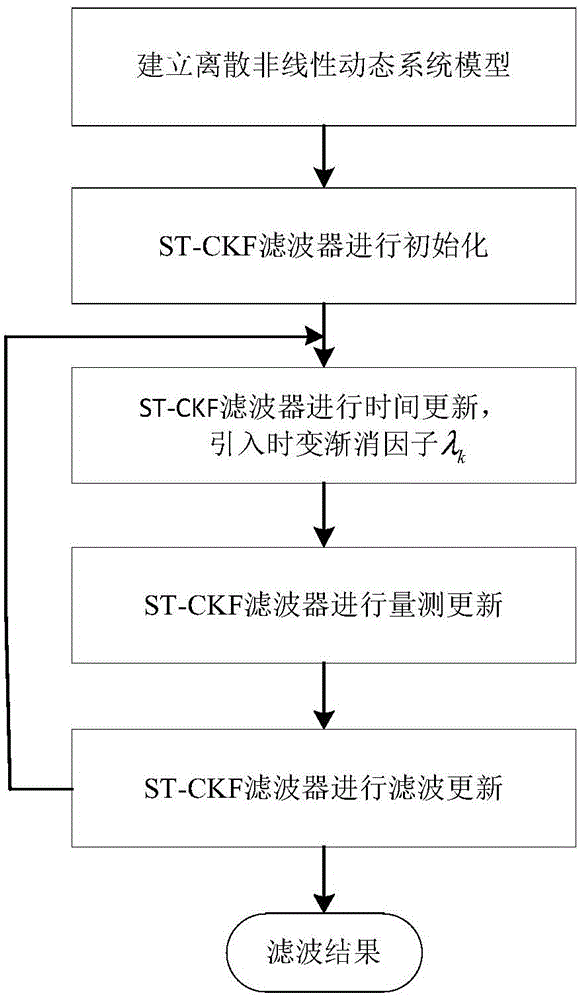
[0046] First, a discrete nonlinear dynamic system model is established; the ST-CKF filter is initialized; the ST-CKF filter is updated in time, and the time-varying fading factor λ is introduced k ; The ST-CKF filter performs measurement update; the ST-CKF filter performs filter update. Its implementation flow chart is as follows figure 1 As shown, it specifically includes the following five steps:
[0047] 1. Establish a discrete nonlinear dynamic system model as follows:
[0048] x k =f(x k-1 )+w k-1
[0049] z k =h(x k )+v k
[0050] where x k is the state vector at time k, and the dimension is n, similarly x k-1 is the state vector at time k-1, the dimension is n, z k is the measured value at time k, w k-1 and v k are the process noise and the measurement noise respectively, they are independent of each other, and the covar...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More