

Novel point cloud parallel Softassign registering algorithm
A registration algorithm and point cloud technology, applied in the field of image processing, can solve the problem of low point cloud registration accuracy, achieve the effects of avoiding local registration, improving computing speed, and reducing the amount of information
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0012] The present invention will be further explained below in conjunction with the accompanying drawings and specific embodiments.
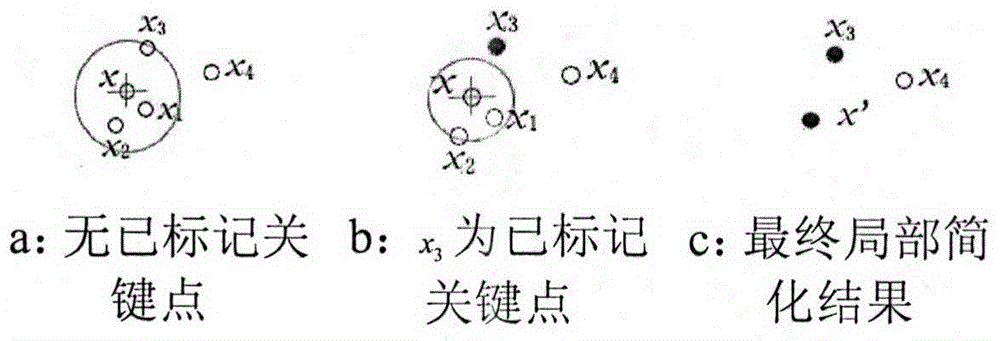
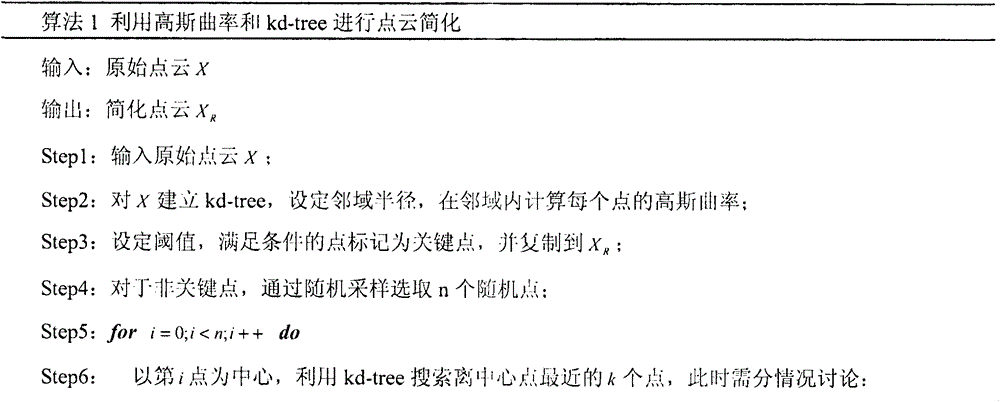
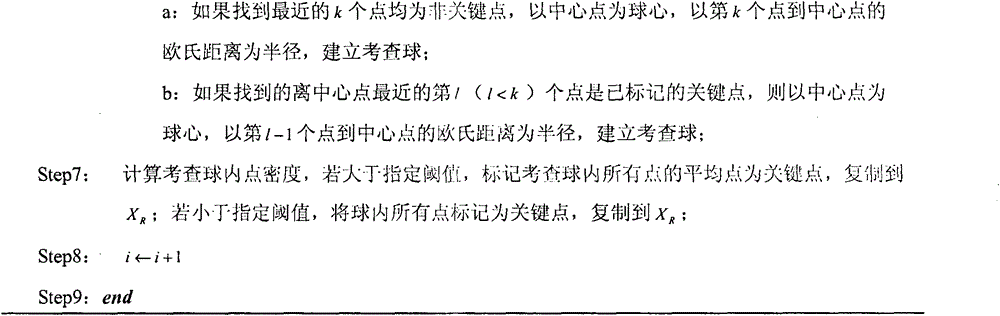
[0013] 1. Use kd-tree for point cloud simplification
[0014] Assuming that the original point cloud data bit X of the three-dimensional object is first established, a kd-tree (K-dimension tree) of the original point is used to quickly search the neighborhood and the nearest point. Kd-tree is a useful data structure for dividing data in k-dimensional space. The 3D object point cloud can create a kd-tree, the main application is data point search, and there are two search methods: one is neighborhood search, which can search for neighborhood points within the specified neighborhood radius; the other is k-neighborhood search, The k data points closest to the target point can be searched, and when k=1, the nearest point is searched. Because kd-tree is a data structure based on space division, when searching for data, starting from the small spac...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More