

Overall registering method for global optimization of multi-view three-dimensional laser point clouds
A three-dimensional laser and global optimization technology, applied in image data processing, instrumentation, computing, etc., can solve the problems of manual operations, low applicability, and low efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0049] The technical invention will be described in detail below, but the protection scope of the present invention is not limited to the embodiments.
[0050] Multi-view 3D laser point cloud global optimization overall registration method, the detailed implementation steps of this method are as follows:
[0051] (1) Establish and derive a multi-view 3D laser point cloud global optimization overall adjustment model;
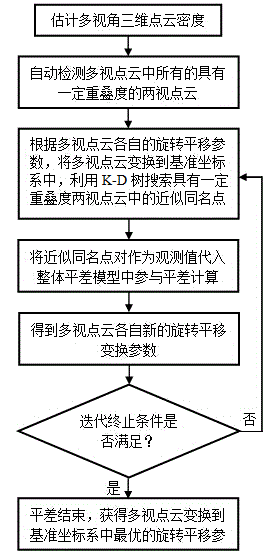
[0052] (2) Scan the surface of the object from multiple perspectives, obtain 3D point clouds from multiple perspectives, initially register them in a unified coordinate system, and estimate the density D of the 3D point cloud;
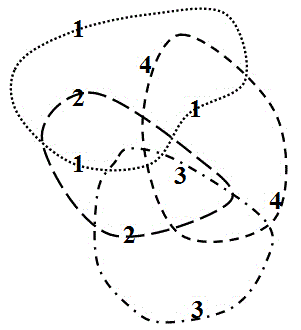
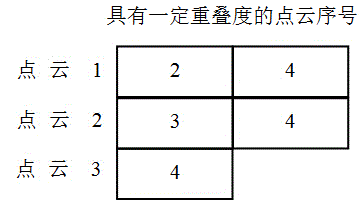
[0053] (3) Traverse the multi-view 3D point cloud after rough registration, automatically detect all two-view 3D point clouds with a certain degree of overlap, and save the point cloud serial number to the dynamic array;
[0054] (4) From step (3), all two-view point clouds with a certain degree of overlap in the multi-view point cloud c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More