

Changeable parallelogram crawler-type in-pipe mobile operation robot
A parallelogram and mobile operation technology, applied in the field of robotics, can solve problems such as deficiencies in adaptability, achieve strong obstacle-crossing capabilities, and reduce the risk of jamming
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
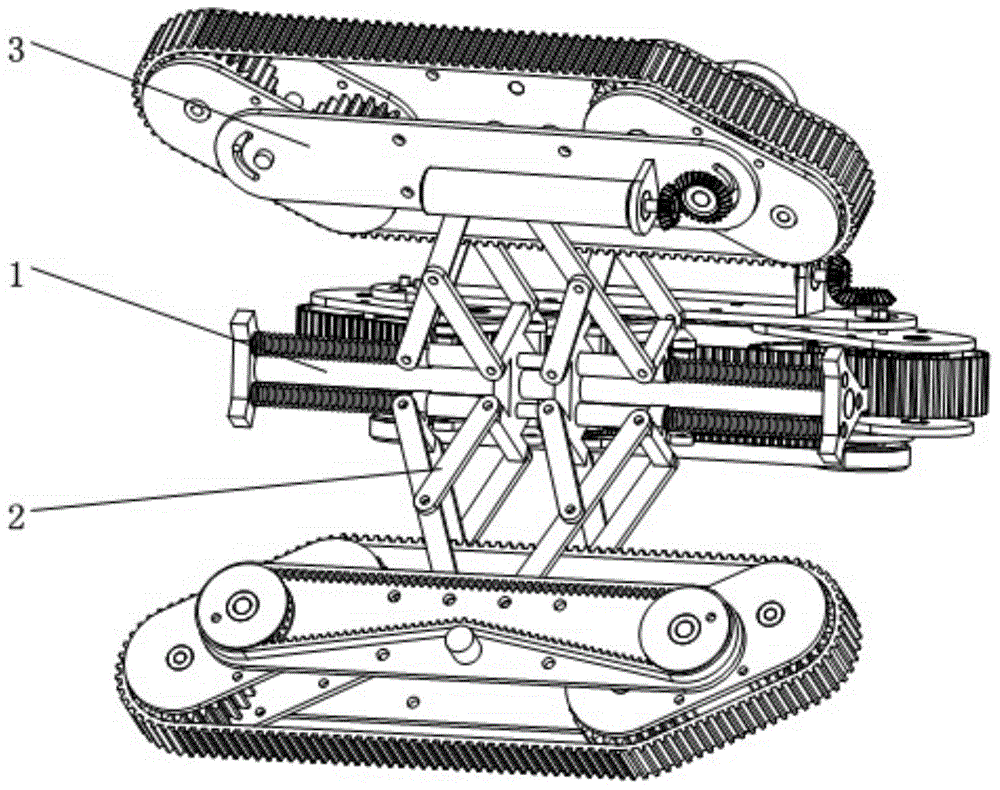
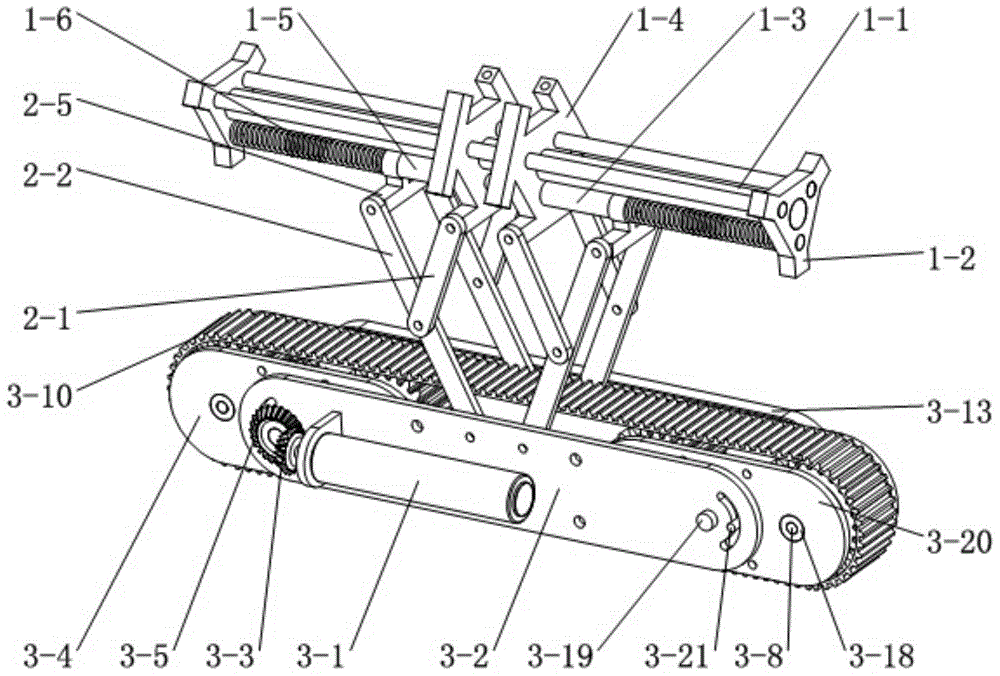
[0028] Such as figure 1 and 2 As shown, a variable parallelogram crawler type pipe mobile working robot includes a car body assembly 1 , a double slider suspension assembly 2 and a variable parallelogram crawler assembly 3 . Three variable parallelogram crawler assemblies 3 press against the inner wall of the pipe, and each variable parallelogram crawler assembly 3 is connected to the vehicle body assembly 1 through a double-slider suspension assembly 2, and the variable parallelogram crawler assembly 3 drives the variable parallelogram The quadrilateral track assembly 3 expands or contracts relative to the vehicle body assembly 1 .
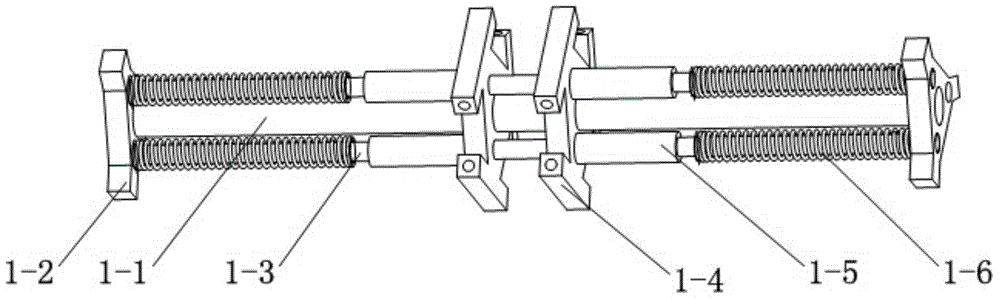
[0029] Such as image 3 As shown, the vehicle body assembly 1 includes a main support shaft 1-1, an auxiliary support shaft fixing block 1-2, an auxiliary support shaft 1-3, a sleeve positioning block 1-4, an auxiliary ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More