

Seven-degree-of-freedom human-simulated mechanical arm system based on human engineering
A technology with ergonomics and degrees of freedom, applied in the field of humanoid robots, can solve the problems that the human arms are far apart in the working space and cannot simulate the movement of human arms, and achieve strong motion flexibility and fault tolerance, high rigidity and precision Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] The present invention will be further described in detail with reference to the accompanying drawings and embodiments.
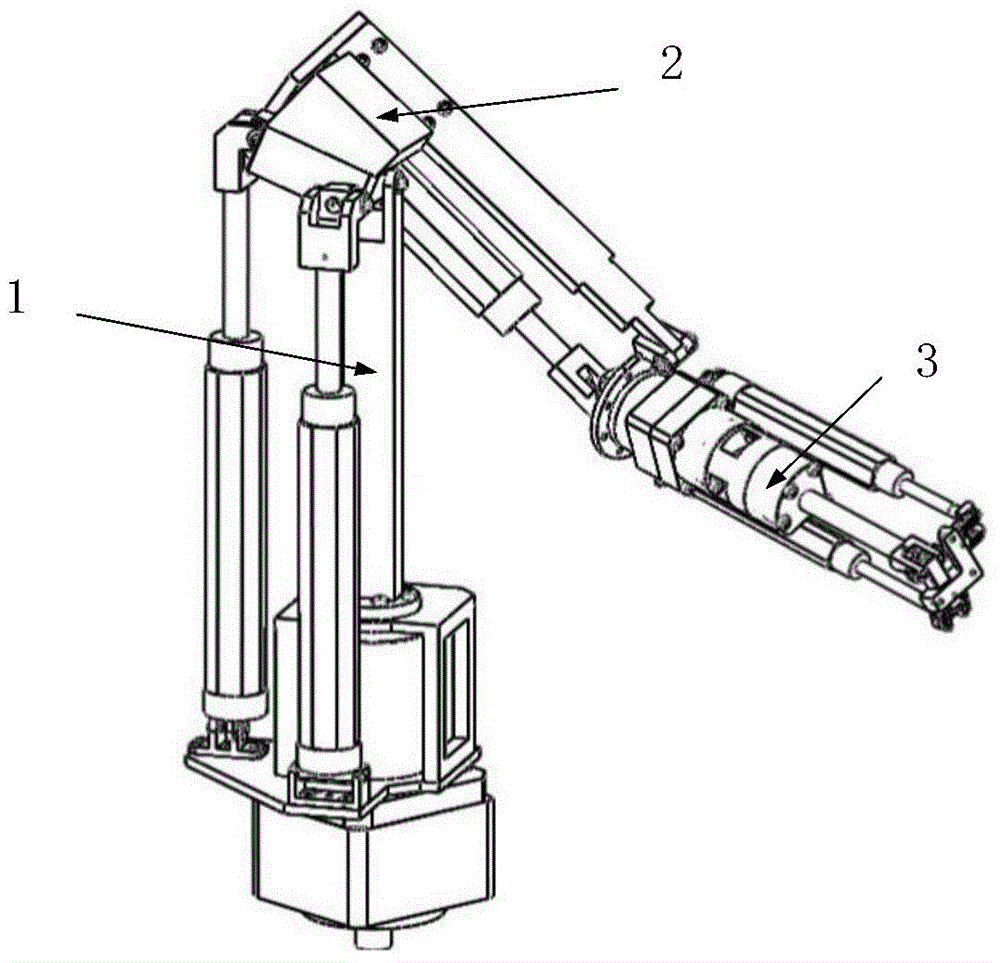
[0043] Such as figure 1 , described in the present invention figure 1 The middle mechanical structure includes a shoulder joint and a support 1 , a large arm and a mounting plate 2 , and a forearm 3 . Wherein the shoulder joint and the bearing 1 have a total length of 600mm, the upper arm 2 has a total length of 340mm, and the forearm has a total length of 270mm. Its position connection relationship is: the big arm and the mounting plate 2 are fixed on the shoulder joint and the moving platform of the bearing 1, and connected by screws;
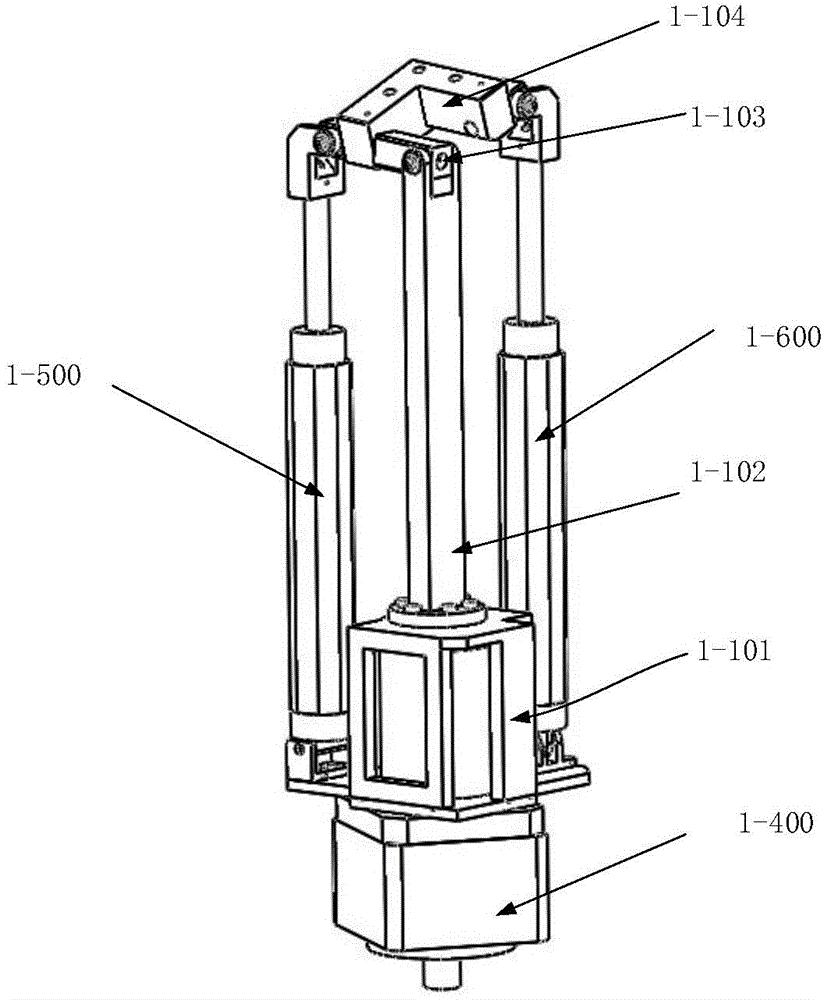
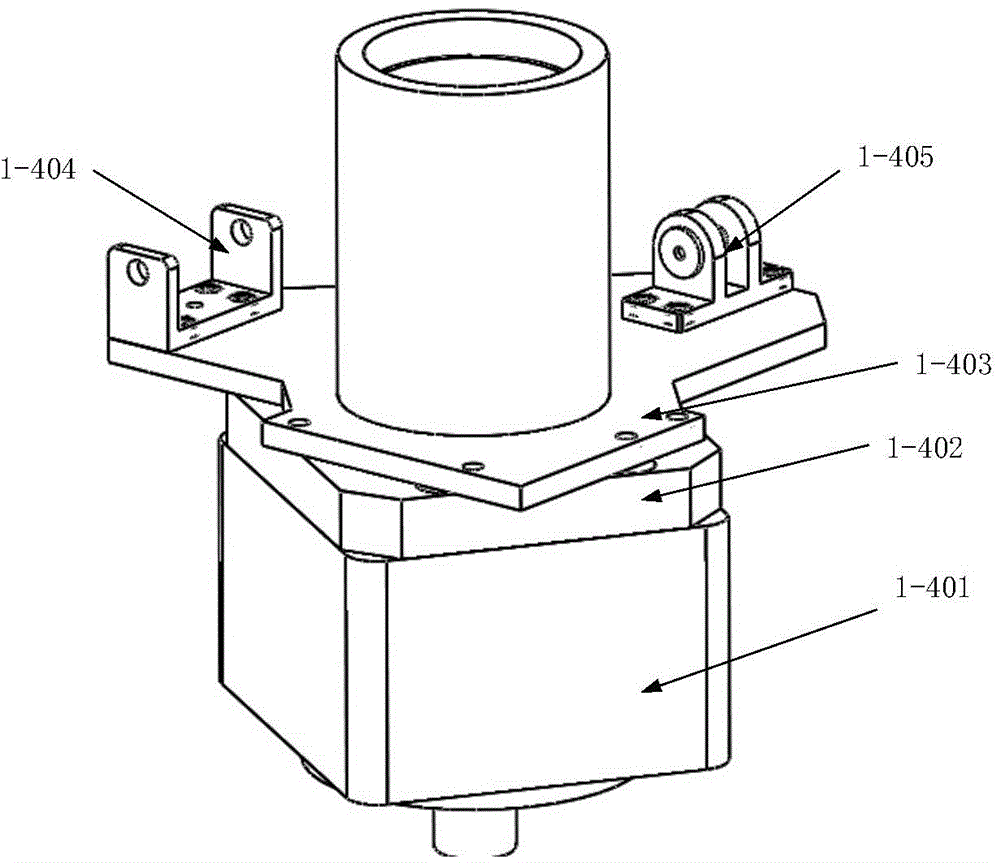
[0044] Such as figure 2 , the shoulder joint and support 1 of the present invention, hydraulic swing cylinder 1-401, swing cylinder output shaft seat 1-402, eccentric installation base plate 1-403, installation center base plate 1-101, shoulder joint dynamic platform support 1-102 , long slider 1-103, shoulder j...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More