

A hexapod wheel-legged crawling bionic robot
A bionic robot and wheel-leg technology, applied in the field of bionic robots, can solve problems such as limited performance, and achieve the effect of improving fault tolerance.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0015] The present invention will be further described below in conjunction with accompanying drawing:
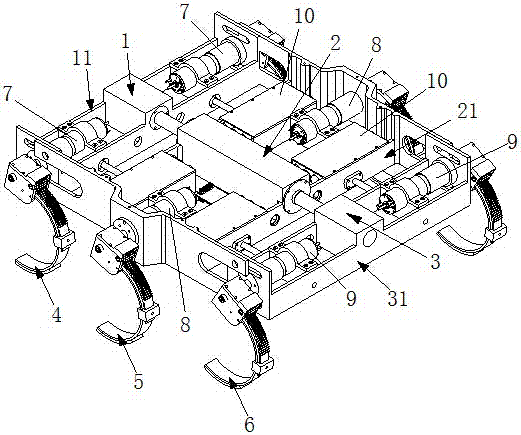
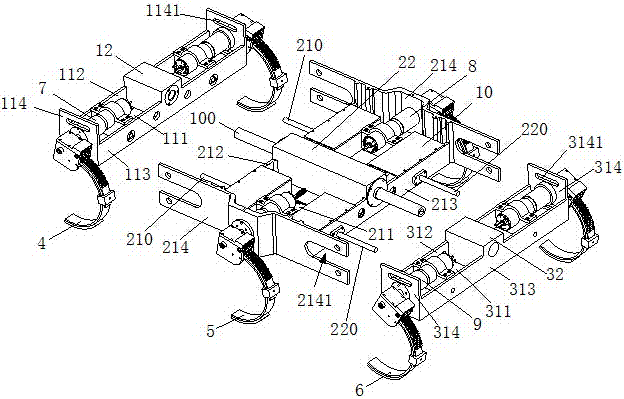
[0016] Such as figure 1 A hexapod wheel-legged crawling bionic robot shown, including sequentially connected torso front 1, trunk middle 2, trunk rear 3 and respectively arranged on both sides of trunk front 1, trunk middle 2, and trunk rear 3 The front wheel leg assembly 4, the middle wheel leg assembly 5, and the rear wheel leg assembly 6, that is, the whole bionic robot is composed of three parts: the front part of the trunk, the middle part of the trunk and the rear part of the trunk. Side; preferably, the front part of the trunk, the middle part of the trunk, and the rear part of the trunk are all made of engineering plastics through 3D printing, which not only reduces the overall weight, but also enhances the structural strength. The distance between the front trunk part 1, the trunk rear part 3 and the trunk middle part 2 is adjustable, and the front wheel leg assem...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More