

Ground three-dimensional laser scanning point cloud and image fusion and registration method
A three-dimensional laser and image fusion technology, applied in image enhancement, image analysis, image data processing and other directions, can solve the problems of low precision and many restrictions, achieve good fault tolerance, remove the influence of illumination changes, and enhance anti-noise. effect of ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0041] The present invention will be described in further detail below with reference to examples.
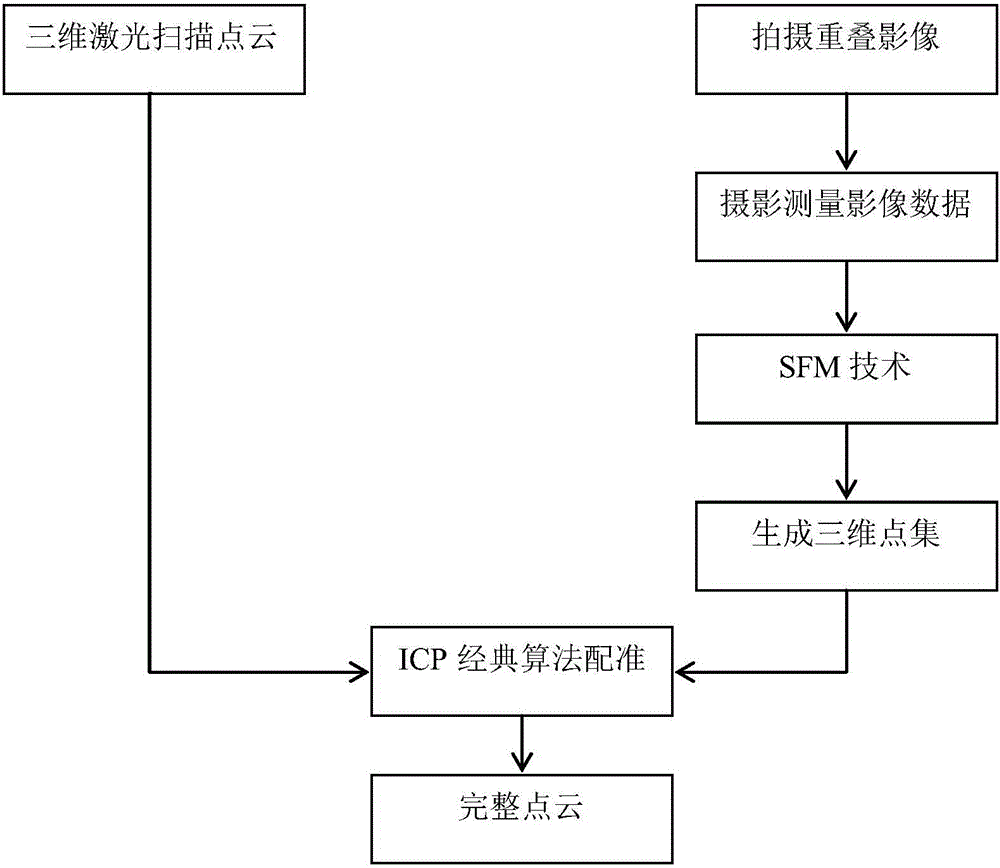
[0042] A method for fusion and registration of ground three-dimensional laser scanning point cloud and image provided by the present invention includes a point cloud and image data acquisition module, a point cloud data registration module, an image data splicing module and a dense reconstruction module; The image data acquisition module mainly collects point cloud data and image data; the iterative nearest point algorithm module mainly registers the point cloud generated by the three-dimensional laser scanning point cloud and the image three-dimensional reconstruction; the image data splicing module, It mainly uses the SIFT image stitching algorithm to stitch the collected images and photos to obtain a panoramic picture; the dense reconstruction module mainly uses the scene information and the original picture to obtain the 3D point cloud of the object in the photo;
[0043] T...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More