

Backstepping-sliding mode control unit and method for controlling precision of multi-axis linkage system
A system controller and multi-axis linkage technology, which is applied in simulators, general control systems, control/regulation systems, etc., can solve the problems of low tracking accuracy and low stability of control methods
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0048] Below in conjunction with accompanying drawing, the present invention is described in further detail:
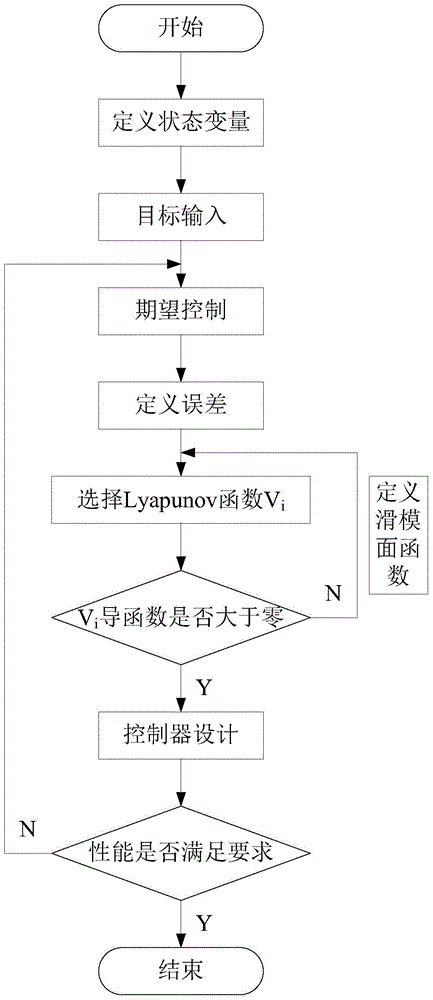
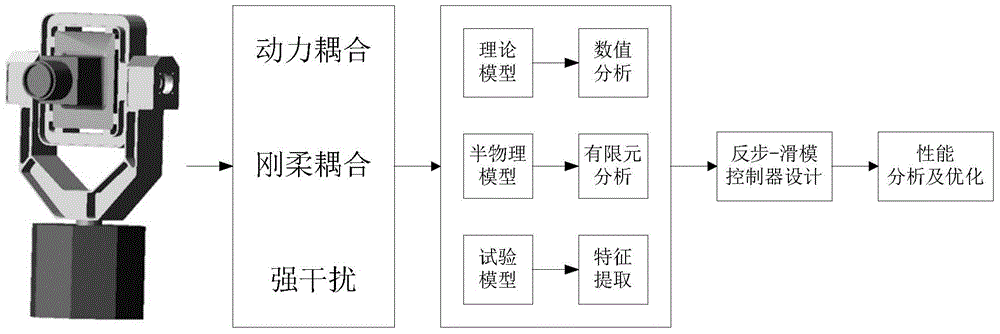
[0049] see Figure 1 to Figure 2 , the present invention comprises the following steps:
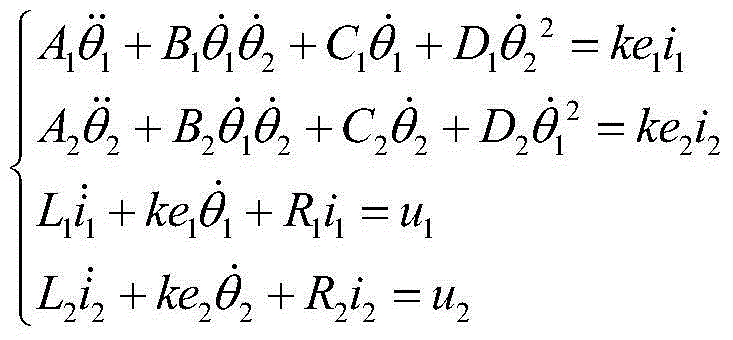
[0050] Step 1: Establish an electromechanical coupling dynamics model of the multi-axis linkage system based on the Lagrange-Maxwell dynamics method;
[0051] The electromechanical coupling dynamic model of the multi-axis linkage system is:
[0052] A 1 θ · · 1 + B 1 θ · 1 θ · 2 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More