

Mobile context point cloud simplification algorithm based on point feature histogram
A point feature histogram and point cloud simplification technology, applied in computing, image data processing, 3D modeling, etc., can solve problems such as being unable to meet the requirements of real-time reconstruction timeliness in mobile scenarios, complex computing, and reducing feature information. , to avoid the training process and complex calculation, improve the calculation efficiency of the algorithm, and achieve the effect of good classification effect.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] In order to make the present invention more comprehensible, preferred embodiments are described in detail below with accompanying drawings.
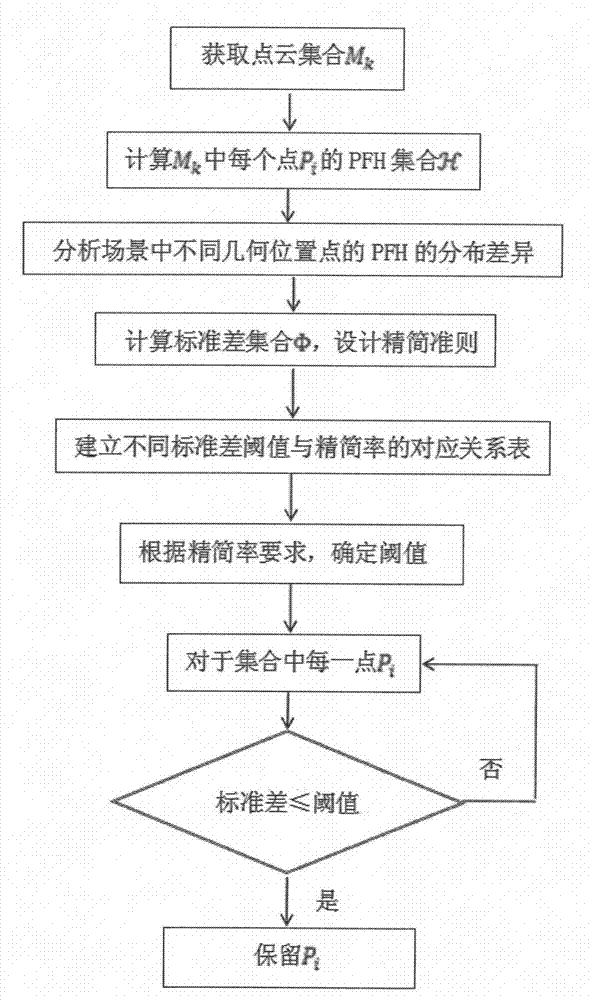
[0037] like figure 1 As shown, the present invention provides a kind of mobile scene point cloud simplification algorithm based on point feature histogram, comprises the following steps:
[0038] Step 1, utilize point cloud obtaining device to obtain point cloud collection, it is characterized in that:
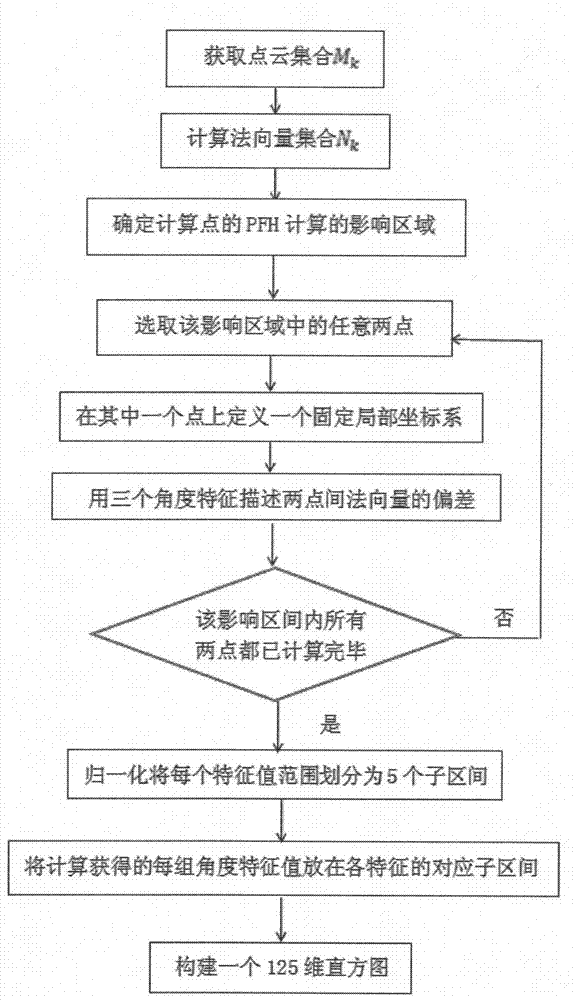
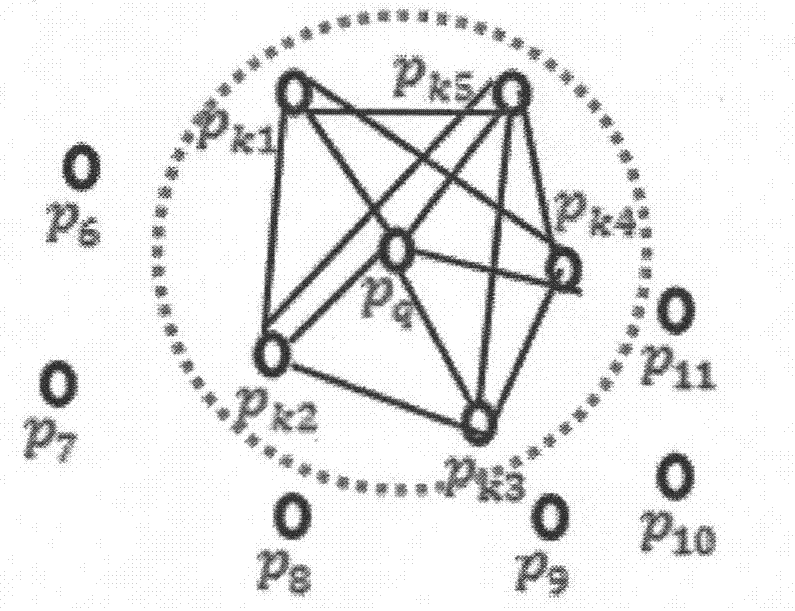
[0039] Step 2. By parameterizing the spatial difference between each calculated point and neighboring points, calculate the PFH operator of each point in the point cloud set (that is, the point feature histogram), where the point feature histogram is used to measure The 3D feature descriptor of the geometric features of each point.
[0040] Step 3. Analyze the distribution difference of point feature histograms of point clouds at different positions of geometric objects in the scene. It can be seen that: on a flat surface, the d...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More