UUV trajectory sight guiding method with sideslip angle considered under condition of environmental disturbance
A technology of environmental interference and sideslip angle, which is applied in two-dimensional position/track control and other directions, can solve the problems of stable track error by sight guidance method, and achieve the effect of eliminating stable track error and accurate tracking.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
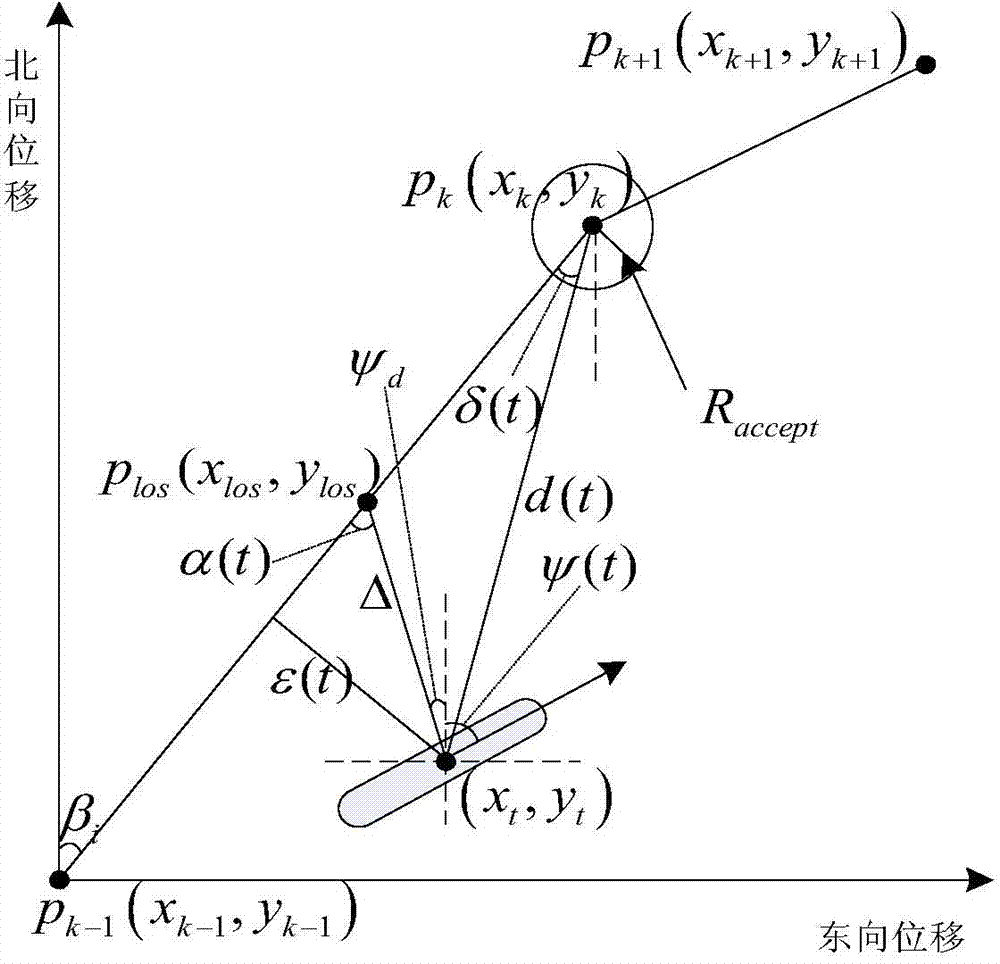
[0020] Specific implementation mode one: combine figure 1 Description of this embodiment, the UUV track line-of-sight guidance method considering the sideslip angle under environmental interference, includes the following steps:
[0021] step one:
[0022] For an open water area, the track of UUV can be expressed as a series of track points {P 1 ,...,P k-1 ,P k ,...,P n} in the form of sequential connection; assuming that a straight line segment formed by two adjacent track points is P k-1 P k , where P k-1 and P k are the starting point and end point of the straight line segment respectively; here define P k is the turning point of the UUV track, that is, when the current position of the UUV is at P k as the center of the circle, with R accept When within a circular neighborhood with a radius of , the desired track of the UUV is switched to P k P k+1 The straight line segment, that is, the starting point of UUV is updated to P k , the end point is updated to P k...
specific Embodiment approach 2
[0029] Specific embodiment two: the relationship between the parameters of the line of sight guidance method described in step 1 described in this embodiment is as follows:
[0030] beta i =atan2(y k -y k-1 ,x k -x k-1 )
[0031] δ(t)=β i -atan2(y k -y t ,x k -x t )
[0032] d ( t ) = ( x k - x t ) 2 + ( y k - y t ) 2
[0033] ε(t)=d(t)*sin(δ(t))
[0034] ψ d = β i -α(t)
[0035] The principle of line-of-sight guidance figure 1 As shown, β i is a di...
Embodiment
[0038] This method is used in the matlab simulation of UUV track tracking, select △ as 4 (UUV length 1.929 meters), set the initial value (x 0 ,y 0 ) is (0,0), (v 0 ,u 0 ) is (0,0). (There are no initial values set for the remaining parameters, and the results are derived through formulas, and are updated in real time as the UUV travels)
[0039] The simulation results are as follows:
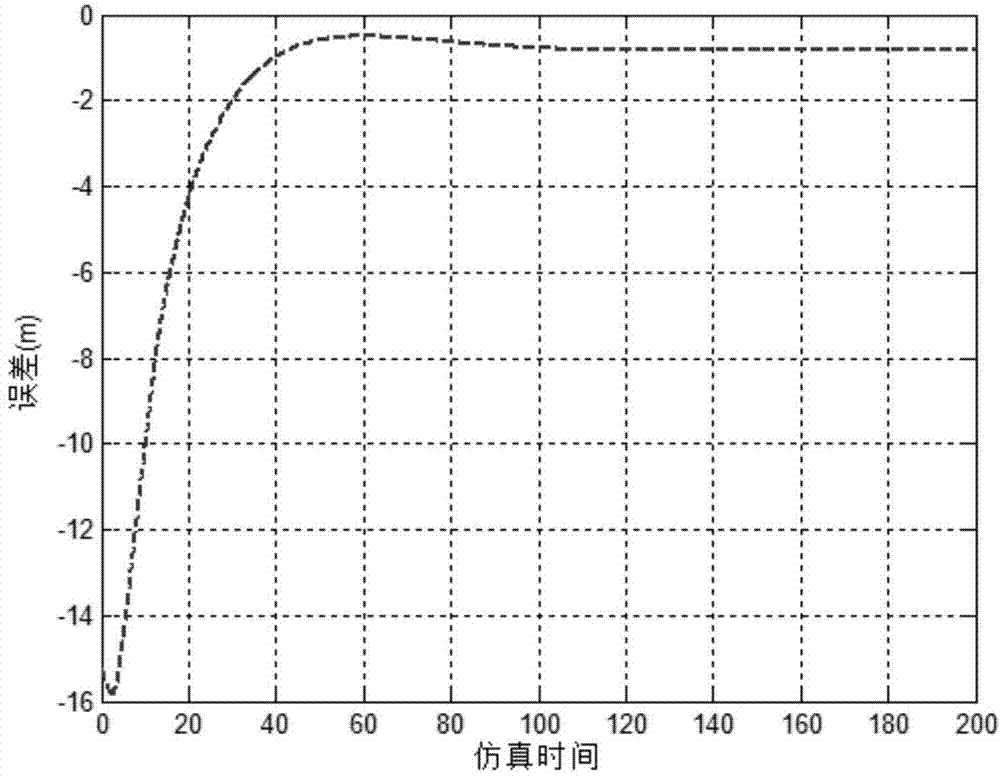
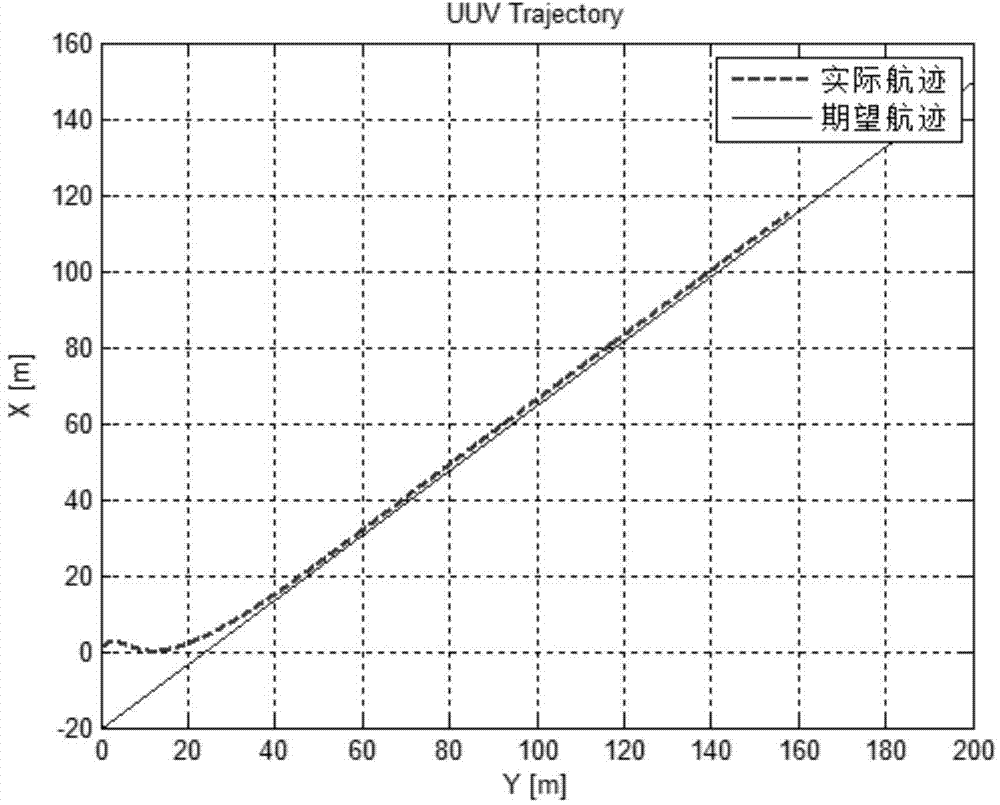
[0040] In the case of ocean current interference, the traditional UUV track line-of-sight guidance method, the simulation results are as follows Figure 2-Figure 3 shown;
[0041] image 3 The trajectory of the middle line is the expected trajectory given artificially, and the dotted trajectory is the actual trajectory. From the simulation results, it can be seen that the UUV can track the expected trajectory, but from figure 2It can be seen that there has been a stable track error after the UUV tracks the upper navigation track.
[0042] Under the condition of sea current interferen...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



