

Target tracking method based on feature point matching
A technology of feature point matching and target tracking, which is applied in the field of signal tracking and can solve problems such as the inability to stably track non-rigid targets
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
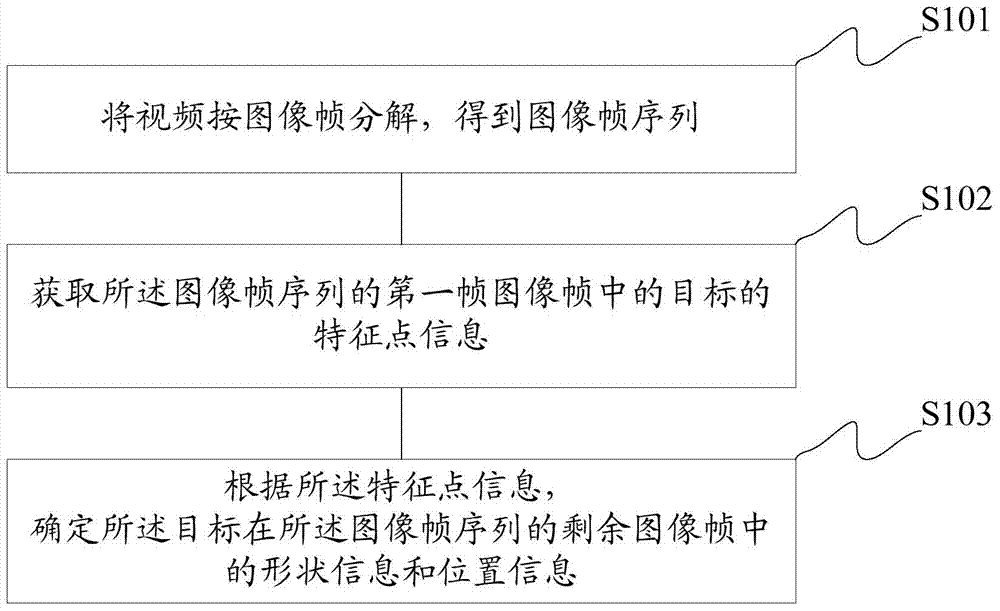
[0047] This embodiment provides a target tracking method based on feature point matching, such as figure 1 As shown, the method described in this embodiment includes:
[0048] Step S101: decomposing the video into image frames to obtain an image frame sequence;
[0049] The external shape characteristics of non-rigid objects change with time. Therefore, it is necessary to decompose the video of non-rigid objects into image frames to obtain image frame sequences. The shape of the target (non-rigid body or other high-speed rotating object) in each image frame in the image frame sequence is different, but the difference between adjacent image frames is not large.
[0050] Step S102: Obtain feature point information of the target in the first image frame of the image frame sequence;
[0051] In order to track the target, it is first necessary to determine the target in the image frame. The usual way to determine the target is to mark the target's feature points and use it as th...
Embodiment 2
[0095] The present invention is described below through a specific scene.
[0096] It is relatively simple to decompose a video into a sequence of image frames, and this embodiment does not give too much description.
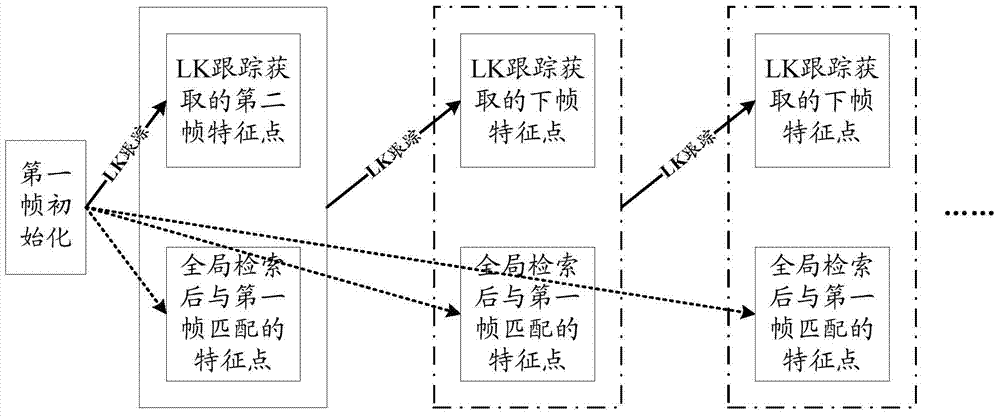
[0097]In this embodiment, whether it is tracking or detection, it starts from the feature points detected globally in the first image frame. We have corresponding numbers for all detected feature points in the first image frame, and track them in subsequent frames. The feature points on and the feature points on the detection matching also correspond to this number, assuming that some feature points of the k+1th image frame are obtained from the kth image frame through optical flow tracking, and these feature points have their own number (corresponding to the first frame), when calculating the angle, scale and position of the k+1 frame image frame target, find the feature point corresponding to the number in the first frame, and calculate the angle, scale and po...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More