

2PR and PRS spatial parallel robot mechanism
A robot and parallel technology, applied in the field of robotics, can solve the problems of high manufacturing cost, poor manufacturability, and complex structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings.
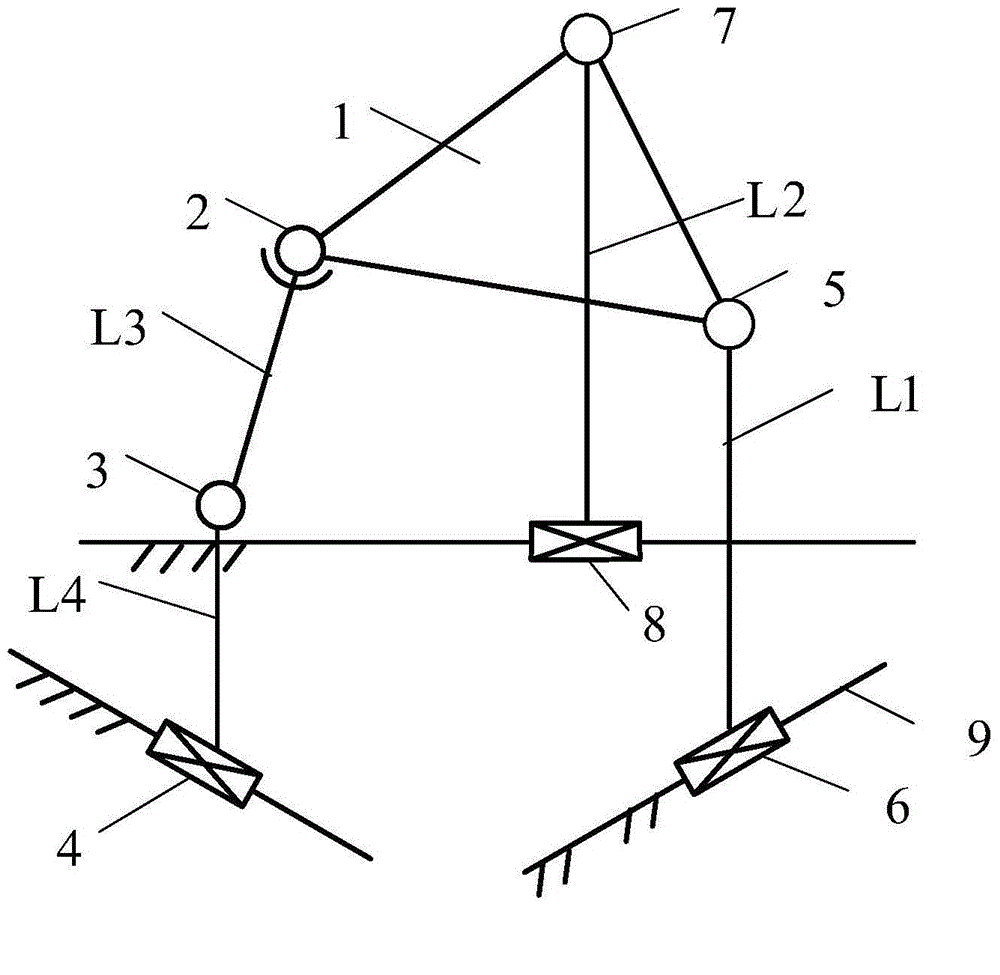
[0023] In one embodiment, such as figure 1 As shown, a 2PR&PRS space parallel robot mechanism is composed of a moving platform 1, a fixed platform 9 and three branch chains connecting the above two platforms, the first branch chain and the second branch chain structure of the three branch chains are the same, the The two branch chains are composed of a rotating pair, a moving pair and the connecting rod between them from top to bottom, and the third branch chain of the three branch chains is composed of a ball pair, a rotating pair, and a cylinder from top to bottom. The pair and the connecting rod between them;
[0024] One end of the first connecting rod L1 of the first branch chain is connected to the moving platform 1 through the first rotating pair 5, and th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More