

Bionic robot fish three-dimensional tracking method based on embedded visual guidance
A technology of visual guidance and tracking control, applied in the field of visual control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0063] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be described in further detail below in conjunction with specific embodiments and with reference to the accompanying drawings.
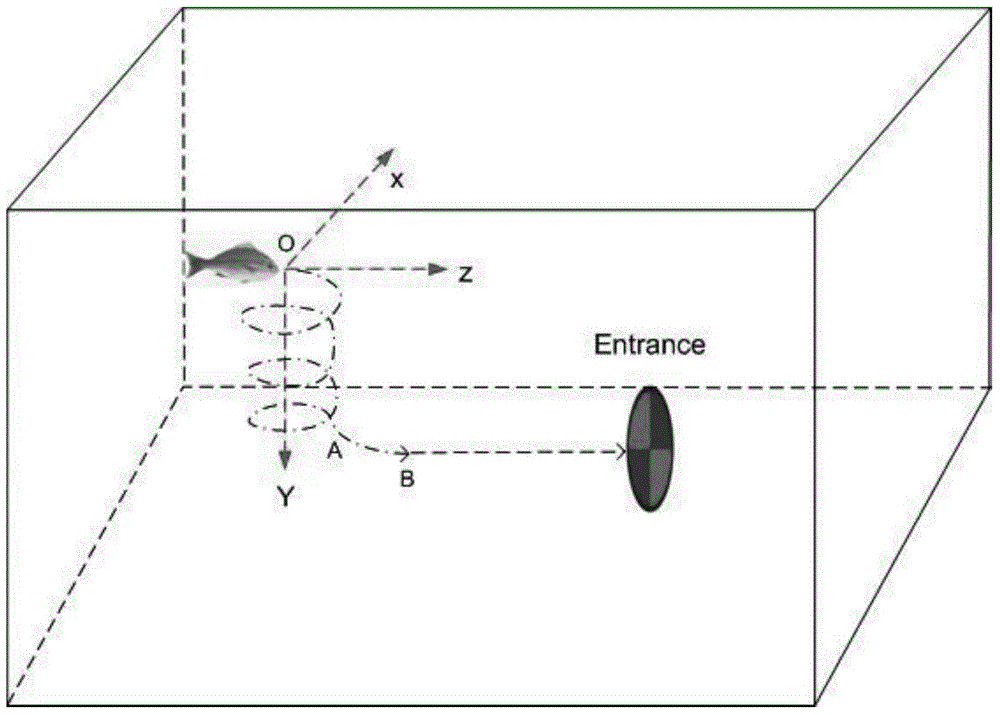
[0064] Such as figure 1 As shown, the inertial coordinate system OXYZ is established by taking the initial position of the bionic robotic fish as the coordinate origin, in which the OY axis is perpendicular to the water surface downward, the OZ axis moves forward along the tail axis at the initial moment of the bionic robotic fish, and the OX axis is defined by The right hand rule is OK. The entire tracking control is divided into visual positioning, fixed depth control, and orientation control. First, the embedded vision system calculates the three-dimensional information of the target (shown as Entrance); then, under the guidance of the vision, the bionic robotic fish swims to the depth of the target (reaching point A)...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More