

Real-time processing method and system of image data of unmanned plane
A technology of image data and real-time processing, applied in the field of drones, can solve problems such as poor space-time matching
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
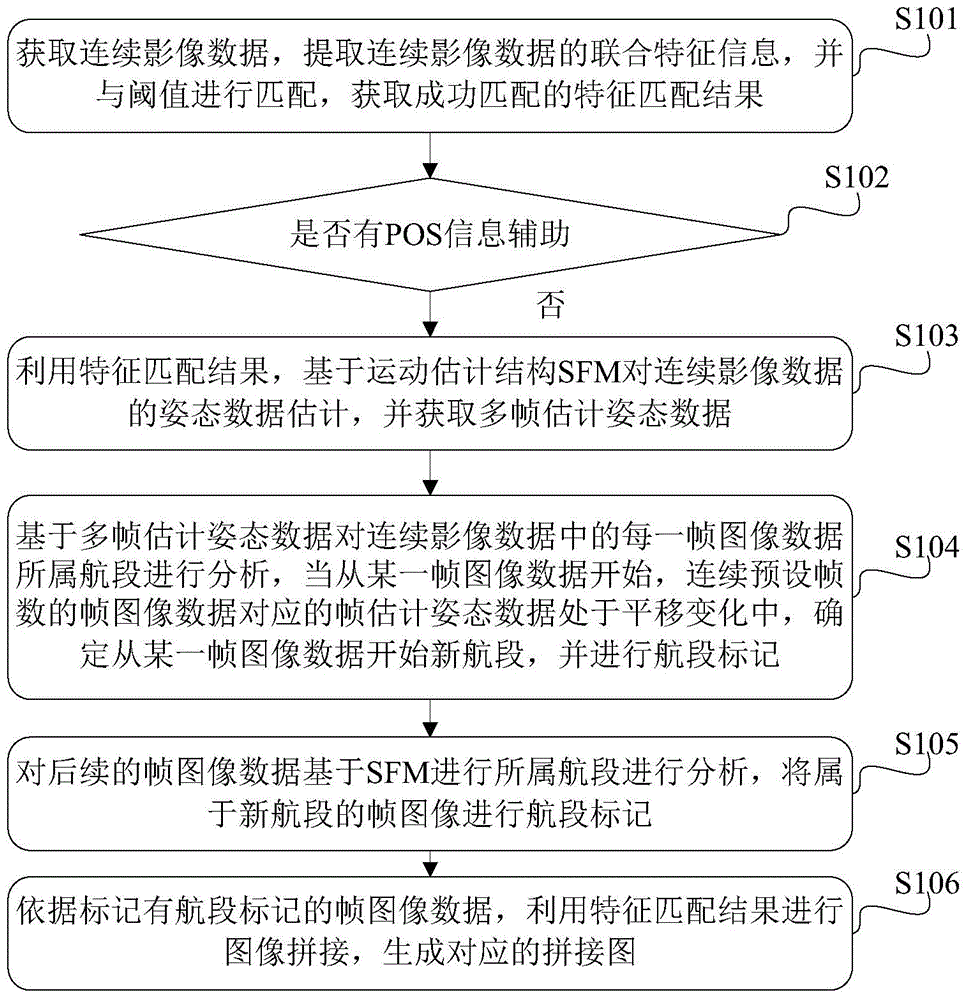
[0070] Embodiment 1 of the present invention provides a method for real-time processing of UAV image data, which is applied to UAVs, such as figure 1 As shown, it mainly includes the following steps:
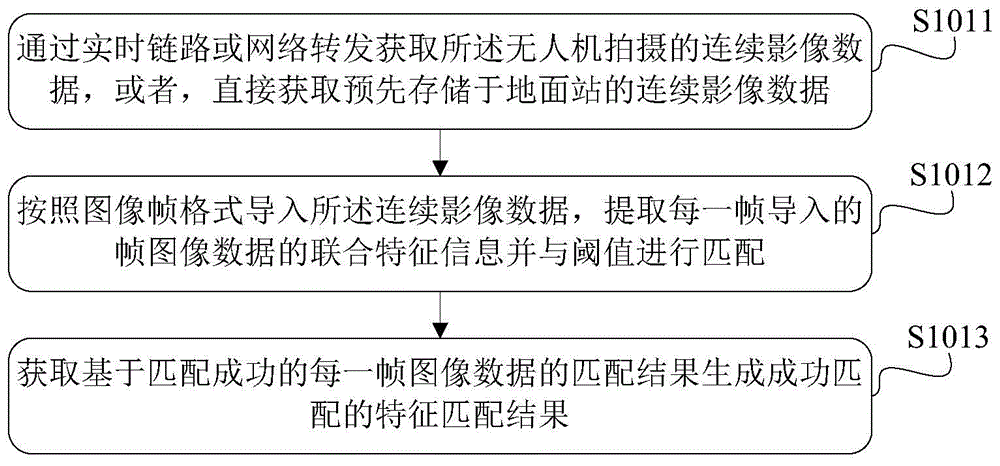
[0071] Step S101, acquiring continuous image data, extracting joint feature information of the continuous image data, matching the joint feature information with a threshold, and obtaining successfully matched feature matching results;
[0072] In step S101, the joint feature information includes FREAK features and SIFT features; in the embodiment of the present invention, a feature extraction and matching process using a combination of FREAK features and SIFT features is used to meet the real-time processing of UAV image data requirements.
[0073] Step S102, judging whether there is POS information assistance, if there is no POS information assistance, then execute step S103;
[0074] In step S102, it is judged whether there is POS information assistance in the current UAV i...
Embodiment 2
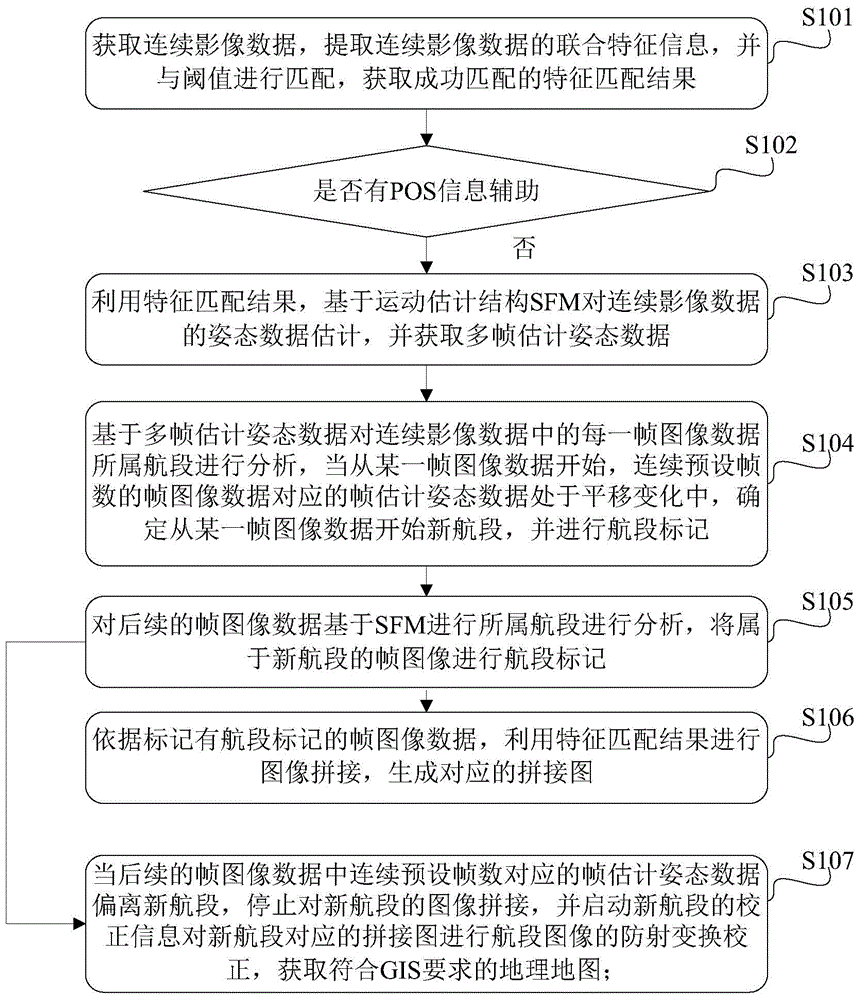
[0085] A method for real-time processing of UAV image data disclosed based on the above-mentioned embodiments of the present invention, such as figure 1 The shown step S105, after performing the analysis of the subsequent frame image data based on the SFM for the flight segment to which it belongs, also includes the following steps: figure 2 Shown:
[0086] Step S107, when the frame estimated attitude data corresponding to the continuous preset number of frames in the subsequent frame image data deviates from the new flight segment, stop the image splicing of the new flight segment, and start the correction information of the new flight segment to update the new flight segment. The mosaic map corresponding to the segment is used to carry out anti-radiation transformation correction of the image of the segment, and obtain a geographical map that meets the requirements of GIS;
[0087] In step S107, the correction information includes track information, or geographical paramet...
Embodiment 3
[0125] Based on the real-time processing method of UAV image data disclosed in the above-mentioned embodiments of the present invention, the corresponding embodiment of the present invention also discloses a real-time processing system for UAV image data, which is also applied to UAVs. Its structural diagram Such as Figure 4 As shown, it mainly includes:
[0126] The extracting and matching device 101 is configured to acquire continuous image data, extract joint feature information of the continuous image data, match the joint feature information with a threshold, and obtain a successfully matched feature matching result, wherein, in the joint feature information Including, FREAK features and SIFT features;
[0127] The judging and estimating device 102 is used to judge whether there is POS information assistance, and if it is judged that there is no POS information assistance, then use the feature matching result to estimate the posture data of the continuous image data bas...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More