

A 3D environment modeling method and system for an unmanned aerial vehicle
A modeling method and unmanned aerial vehicle technology, which is applied in the 3D environment modeling method and system field of UAV, can solve the problems such as the inability to model the 3D environment with a single lens, so as to improve the ability of anti-motion blur and improve the accuracy and robustness, the effect of improving the speed of optimization
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0063] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention. A 3D environment modeling method and system for an unmanned aerial vehicle
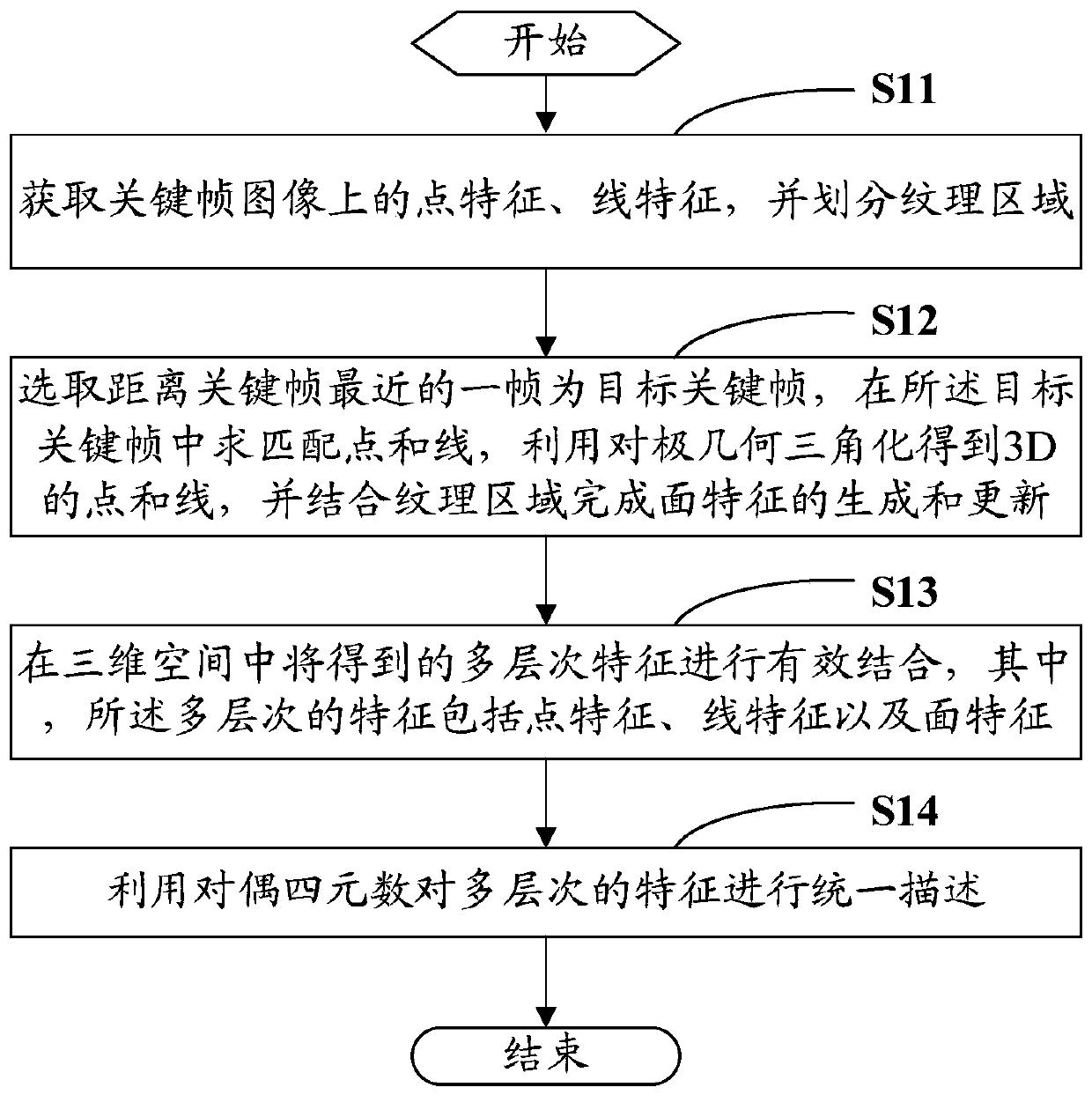
[0064] The specific embodiment of the present invention provides a three-dimensional environment modeling method of an unmanned aerial vehicle, which mainly includes the following steps:
[0065] S11. Obtain point features and line features on the key frame image, and divide texture regions;
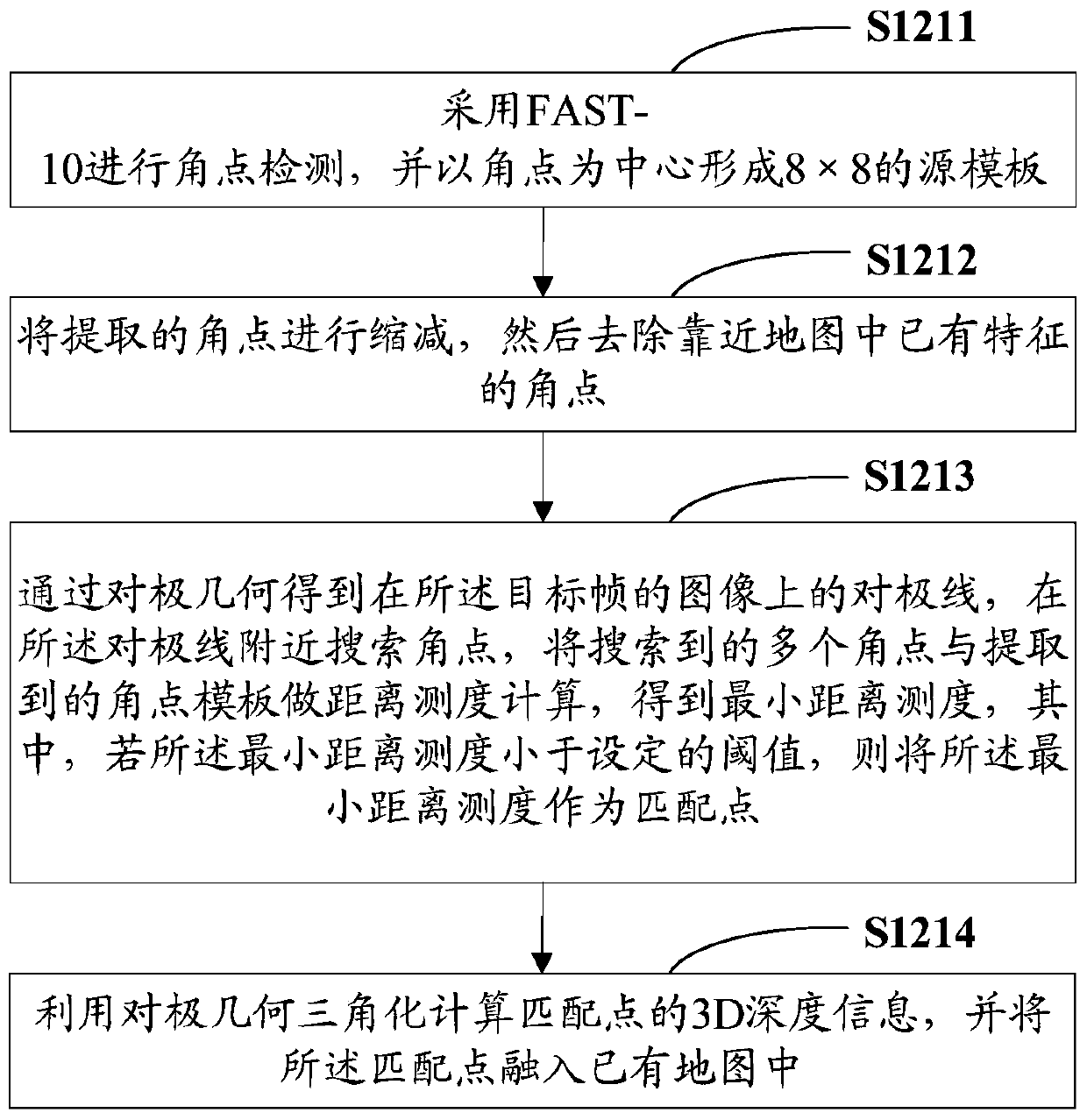
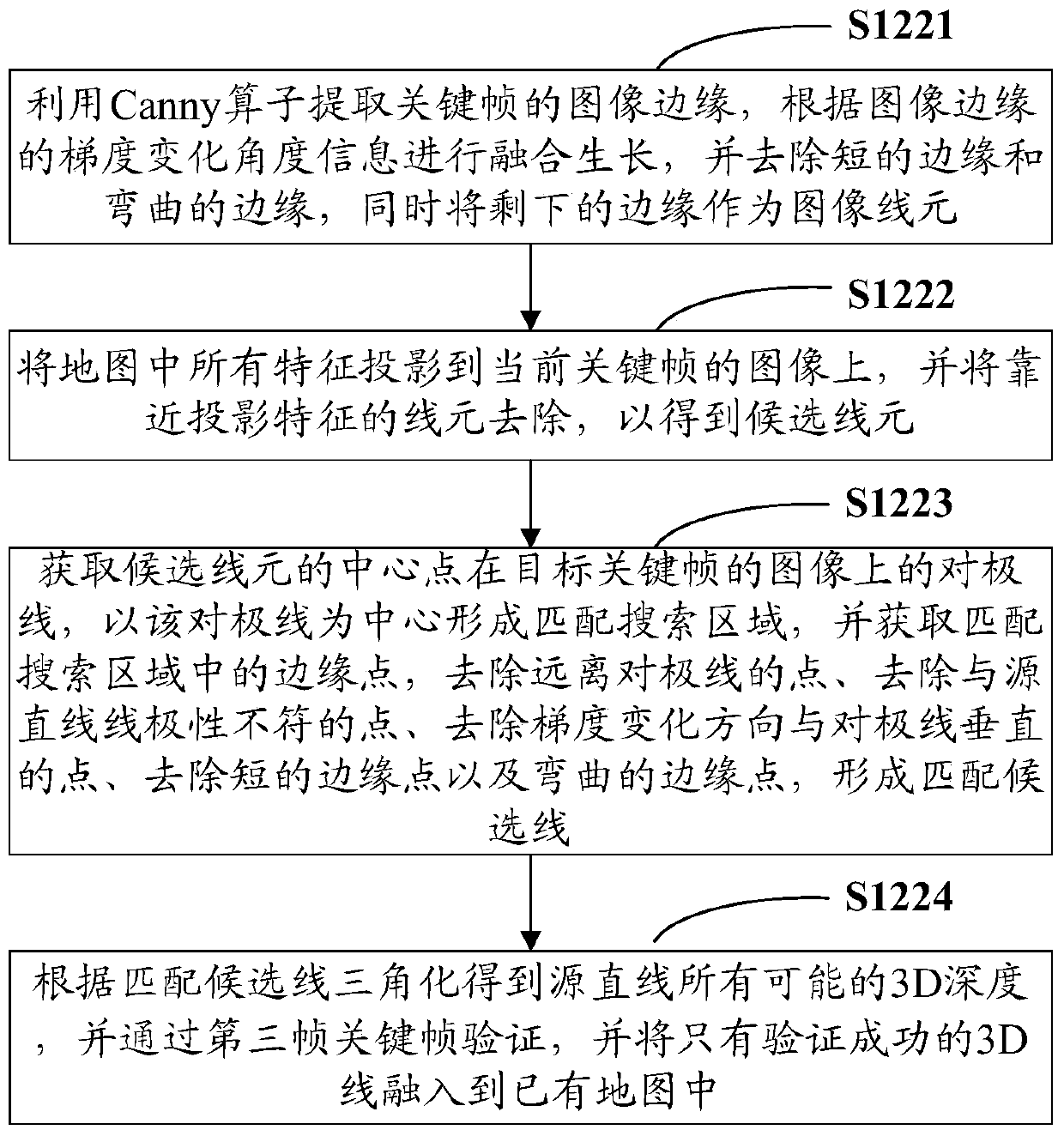
[0066] S12. Select a frame closest to the key frame as the target key frame, find matching points and lines in the target key frame, use epipolar geometric triangulation to obtain 3D points and lines, and complete the surface feature ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More