

Night patrol robot automatic tracking method
A patrol robot and automatic tracking technology, applied in two-dimensional position/channel control and other directions, can solve the problems of missed detection, misjudgment, and unreliability of tracking lines
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
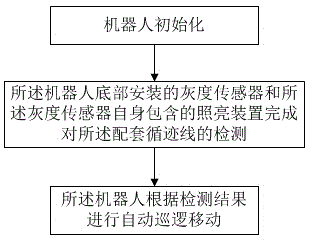
[0038] Such as figure 1 As shown, the method includes the following steps:
[0039] robot initialization;
[0040] The grayscale sensor installed at the bottom of the robot and the lighting device contained in the grayscale sensor itself complete the detection of the matching tracking line;
[0041] The robot obtains the moving result according to the tracking algorithm according to the detection data, and the robot performs automatic patrol movement according to the moving result. In the tracking algorithm, the average value of black and white gray values is taken as the black and white critical value for identifying black and white. It is determined that when the gray value is higher than the black and white critical value, it is recognized as white, and when the gray value is lower than the black and white critical value, it is recognized as black. The movement results include left deviation, right deviation, straight line, left turn, right turn .
[0042] In this meth...
Embodiment 2
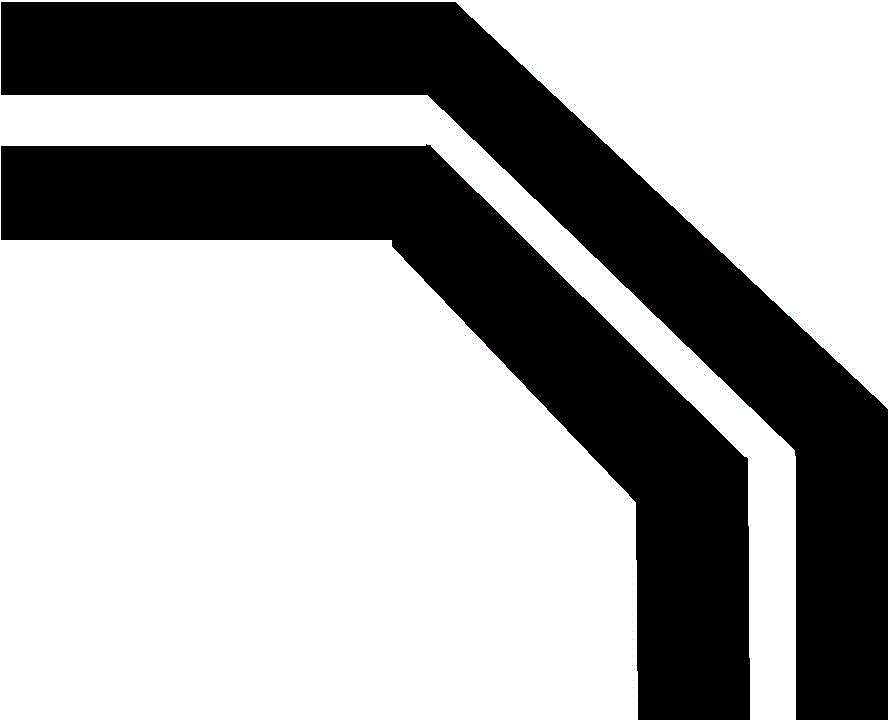
[0044] Such as figure 2 , 3 As shown, in this embodiment, a method for laying black and white line tracks for robot tracking is reasonably designed, which is designed as a white line in the middle and black lines on both sides. The specific design method is as follows:
[0045] On the straight line, the ratio of the width of the black line to the width of the white line is designed as: black: white: black = 1:1:1. (The actual width of the black and white lines can be adjusted depending on the width of the robot chassis and the installation position of the grayscale sensor.) The design schematic diagram of the ratio between the width of the black line and the width of the white line on the straight road is as follows figure 2 shown.
[0046] When the road has a 90-degree turn, in order to avoid the gray sensor at the bottom exceeding the tracking line too much due to the excessive rotation of the robot, the trajectory at the turn is laid in two 145-degree obtuse angles. I...
Embodiment 3
[0058] In this embodiment, on the straight line, the width of the black line and the width of the white line are designed as: black:white:black=10cm:10cm:10cm. When the road has a 90-degree turn, in order to avoid the gray sensor at the bottom exceeding the tracking line too much due to the excessive rotation of the robot, the trajectory at the turn is laid in two 145-degree obtuse angles. In addition, at the turn, the width of the black lines on both sides should be extended as far as possible. The width of the black line and the width of the white line are designed as follows: black: white: black = 20cm: 10cm: 20cm, so as to ensure that the bottom grayscale sensor will not exceed the cycle when the robot turns. Too many traces.
[0059] This embodiment adopts the MultiFLEX of Beijing Bochuang Shanghe Technology Co., Ltd. TM 2- AVR controller as robot controller. The controller uses AVR series ATmega128 single-chip microcomputer as the main processor. The controller functio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More