

Outer skeleton type arm joint information detection device
A technology of information detection and exoskeleton, applied in the direction of claw arm, manipulator, program control manipulator, etc., can solve the problem that the human-computer interaction interface cannot express the robot's control consciousness in a timely and efficient manner, and cannot meet the requirements of the robot's flexibility.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0014] Main structure and parts of the present invention:
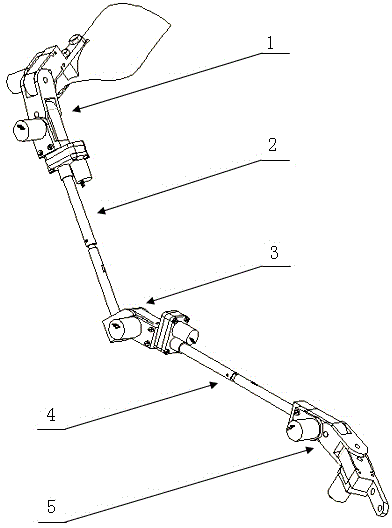
[0015] 1. Shoulder joint 2. Upper arm 3. Elbow joint 4. Forearm joint 5. Wrist joint
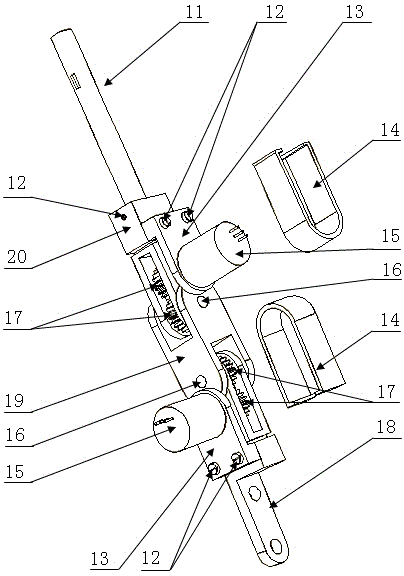
[0016] 11. Spring chamber guide 12. Screw 13. Sensor seat 14. Gear guard 15. Sensor 16. Shaft 17. Gear 18 Wrist distal gearbox 19. Universal connector 20. Wrist proximal gearbox
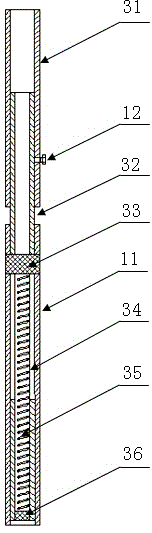
[0017] 31. Gear shaft 32. Spring chamber 33. Slider 34. Spring chamber chute 35. Return spring 36. Spring positioning block
[0018] 41. Elbow joint connector 42. Shoulder and elbow joint gearbox 43. Shoulder and elbow joint joint block 44. Gear shaft guide block
[0019] 51. Arm Base Gearbox 52. Shoulder Base
[0020] Such as figure 1 As shown, the exoskeleton-type arm joint information detection device includes a shoulder joint 1 , an upper arm 2 , an elbow joint 3 , a forearm 4 , and a wrist joint 5 .
[0021] Such as figure 2 As shown, in order to adapt to the arms of different people, the exoskeleton-type arm joint information detection devic...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More