

A Discrete Following Steering Control Method for Hydrostatic-Mechanical Driven Tracked Chassis
A crawler chassis and mechanical drive technology, applied in steering mechanism, non-deflectable wheel steering, transportation and packaging, etc., can solve the problems of low maneuverability and safety, improve steering performance and safety performance, and reduce operation The effect of labor intensity and low cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The specific implementation manners of the present invention will be further described below in conjunction with the drawings and examples, but not limited thereto.
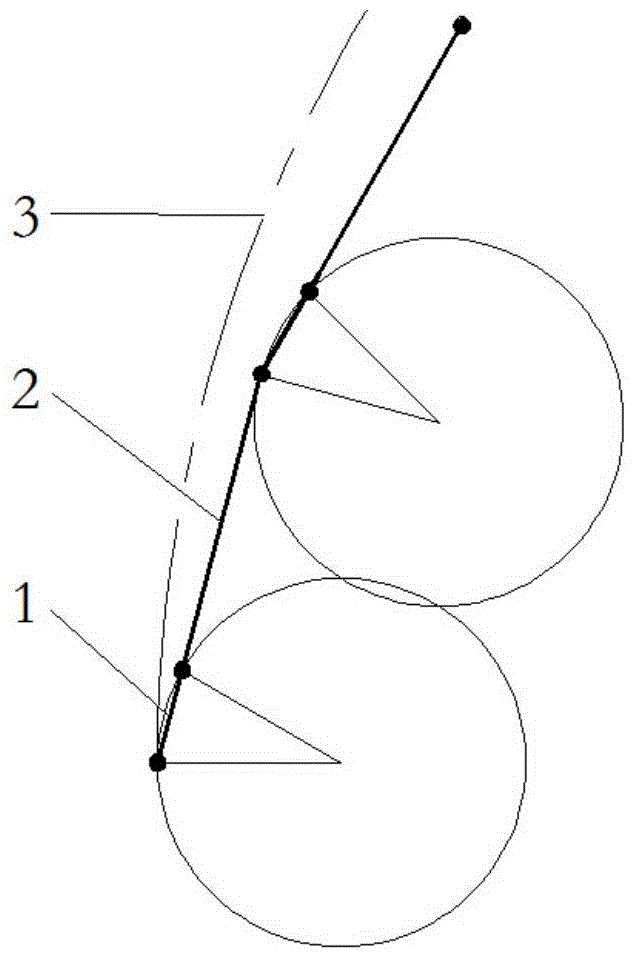
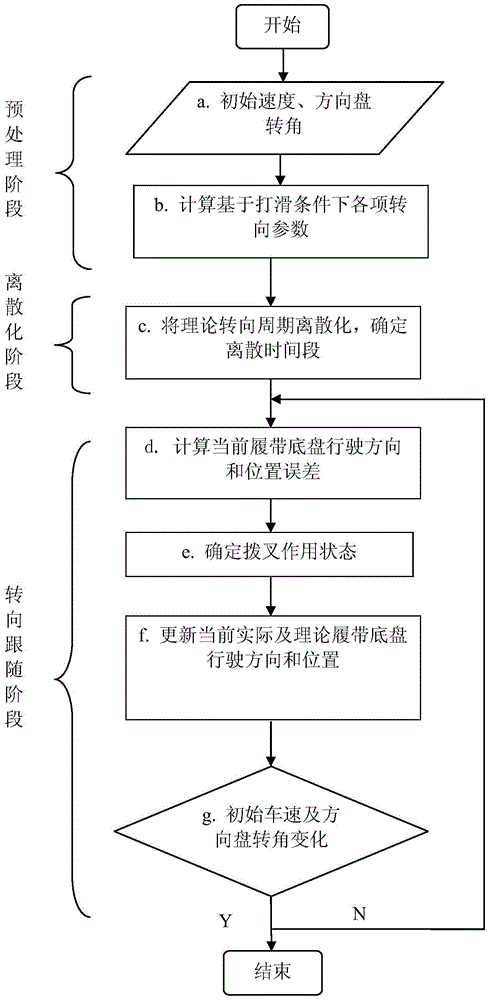
[0024] figure 1 It is a schematic diagram of the discrete following steering trajectory of the present invention; figure 2 It is a flow chart of the discrete following steering control method of the hydrostatic-mechanical driven crawler chassis of the present invention.
[0025] The discrete following steering control method of the hydrostatic-mechanical driven crawler chassis of the present invention is to determine the discrete small time period Δt according to the fork response and the reset time, and according to Δt the theoretical steering calculated from the initial straight-line driving speed v and the steering wheel angle α The discretization of the period T means that the steering control problem is transformed into how to determine the function of the shift fork in each discrete small time peri...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More