

Wheel and track replacement deformation robot
A robot and wheel track technology, applied in the field of wheel track replacement deformation robots, can solve the problems of poor fast obstacle crossing ability and single movement mode, and achieve the effect of improving obstacle crossing ability, high flexibility and easy manufacturing.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
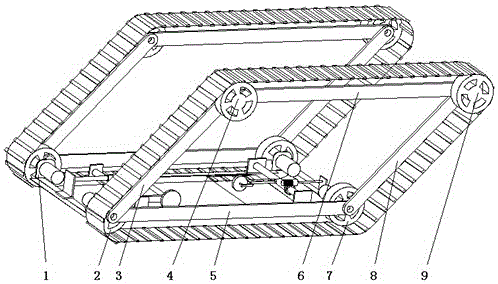
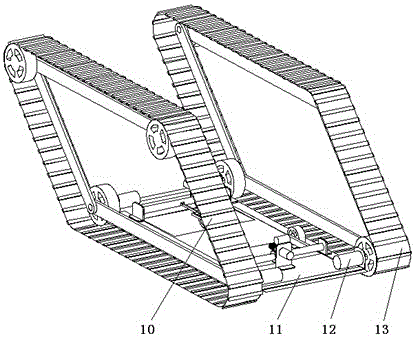
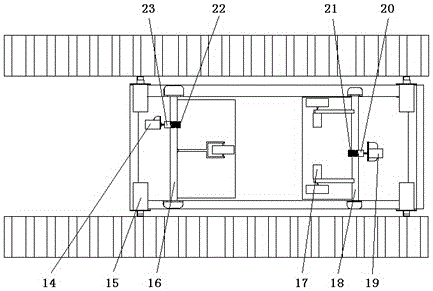
[0023] Embodiment 1: as Figure 1-4 As shown, a wheel-shoe replacement deformation robot includes a crawler deformation walking mechanism, a wheel-type walking mechanism, a wheel-shoe replacement mechanism, and an underframe 11; The mechanism is installed on the wheel shoe replacement mechanism. The crawler deformation walking mechanism includes crawler drive wheel 2, driven crank 3, lower link 5, upper guide wheel 4, upper link 6, lower guide wheel 7, driving crank 8, guide wheel 9. Track II 13, track I 10, deformation motor 15, and track drive motor 12; the deformation motor 15 and track drive motor 12 are respectively installed on the front and rear of the chassis 11, and the track drive wheel 2 is installed on the output shaft of the track drive motor 12, The lower guide wheel 7 is installed on the output shaft of the deformation motor 15, the driving crank 8 and one end of the lower connecting rod 5 are installed on the lower guide wheel 7, the guide wheel 9 is installed ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More