

Unmanned crane space collision avoidance strategy based on fuzzy decision inference
A technology of fuzzy decision-making and cranes, applied in the field of control, can solve the problems of not too much research on unmanned cranes, and few mentions of collision avoidance issues.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0067] Hereinafter, preferred embodiments of the present invention will be described in detail with reference to the accompanying drawings. It should be understood that the preferred embodiments are only for illustrating the present invention, but not for limiting the protection scope of the present invention.
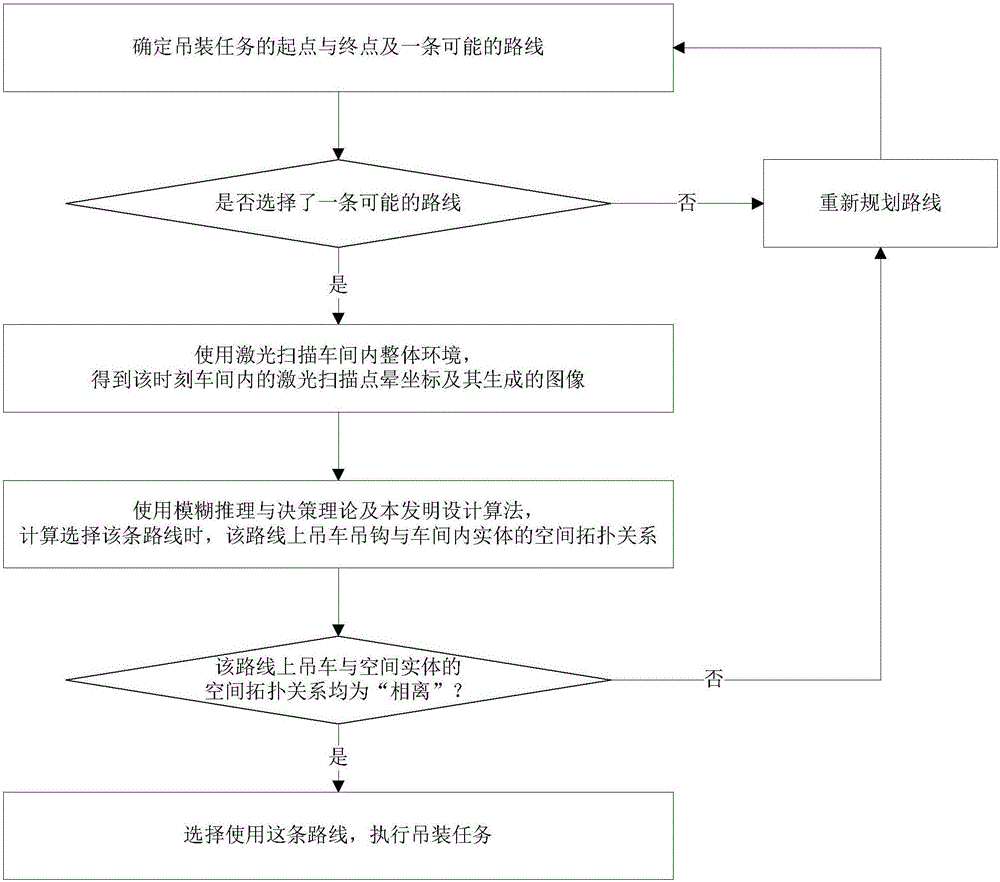
[0068] image 3 It is an operation flowchart for selecting a collision avoidance route and implementing a space collision avoidance strategy for an unmanned crane provided by the embodiment of the present invention. Such as image 3 As shown, a kind of unmanned crane spatial collision avoidance algorithm and its collision avoidance strategy based on fuzzy decision-making reasoning provided by this embodiment include the following steps:
[0069] S1: The user proposes the starting point and end point of the hoisting task and a possible hoisting route;
[0070] S2: judge whether a possible hoisting route is given, if not, design a route;
[0071] S3: If yes, use this...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More