AGV motion control semi-physical simulation system
A semi-physical simulation and motion control technology, applied in the field of robotics, can solve the problems of inconvenient test response, poor feasibility, large economic losses, etc., and achieve the effect of convenient debugging and performance testing, reducing economic losses, and convenient testing.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] The embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings. This embodiment is implemented on the premise of the technical solution of the present invention, and detailed implementation methods and specific operating procedures are provided, but the scope of protection of the present invention is not limited to the following the described embodiment.
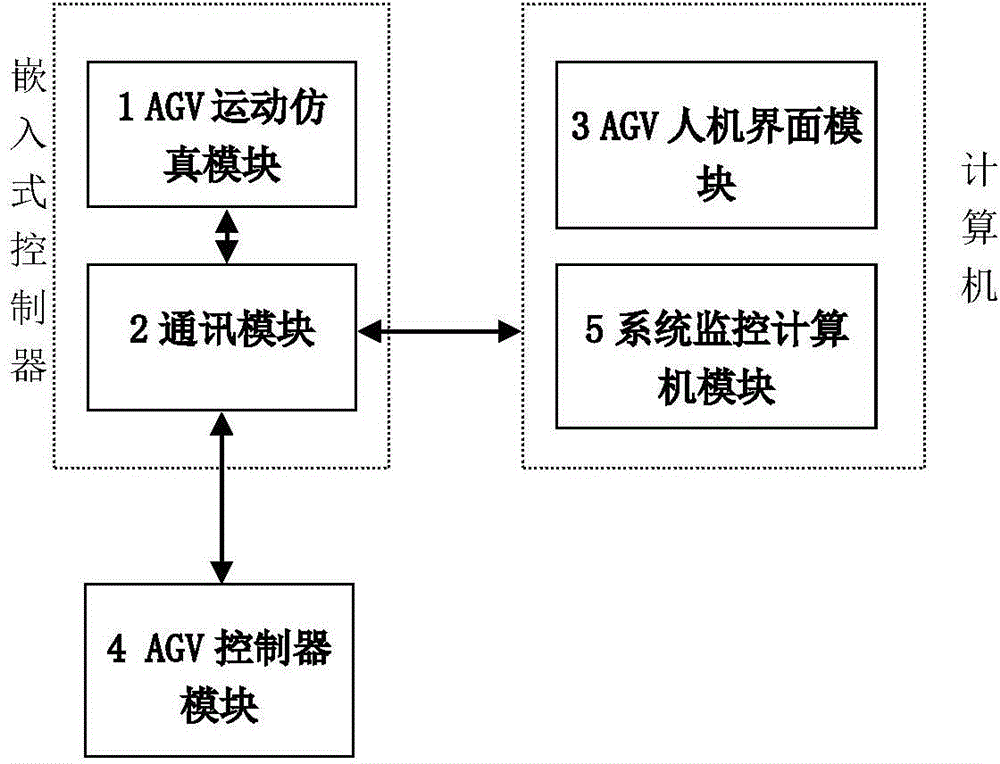
[0033] see figure 1 , the entire simulation system of this example is realized in the embedded controller, and the AGV motion control hardware-in-the-loop simulation system includes five parts: AGV motion simulation module 1, communication module 2, AGV man-machine interface module 3, AGV controller Module 4 and system monitoring computer module 5, wherein, AGV motion simulation module 1 and communication module 2 are set in the embedded controller, AGV man-machine interface module 3 and system monitoring computer module 5 are set in the computer; AGV motion si...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com