

A Swarm Intelligence Algorithm-Based Method for Operating Point Sequence and Trajectory Planning of Industrial Robots
A technology of industrial robots and swarm intelligence, which is applied in two-dimensional position/channel control and other directions, and can solve problems such as difficult trajectories, numerous factors, and complexity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach
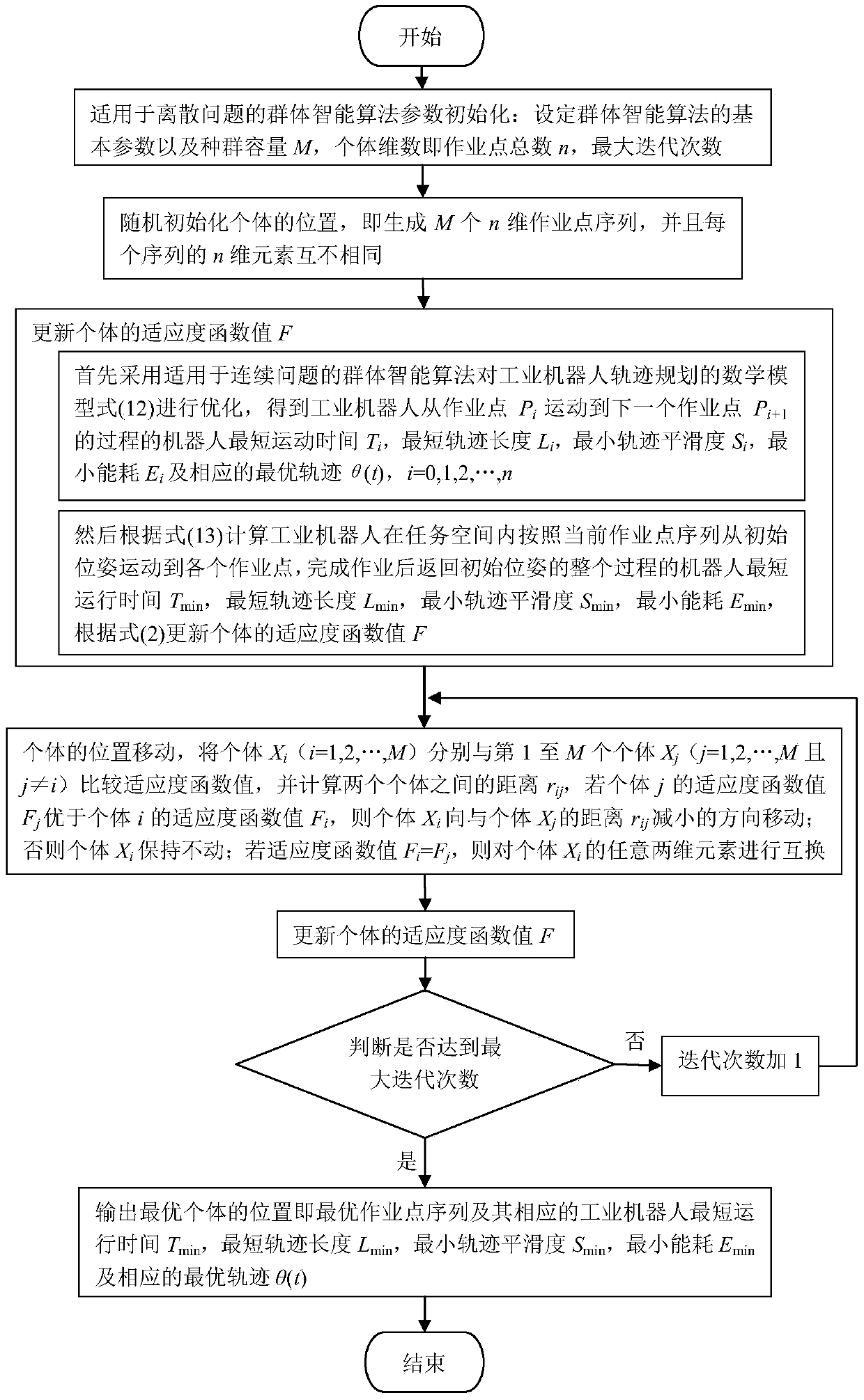
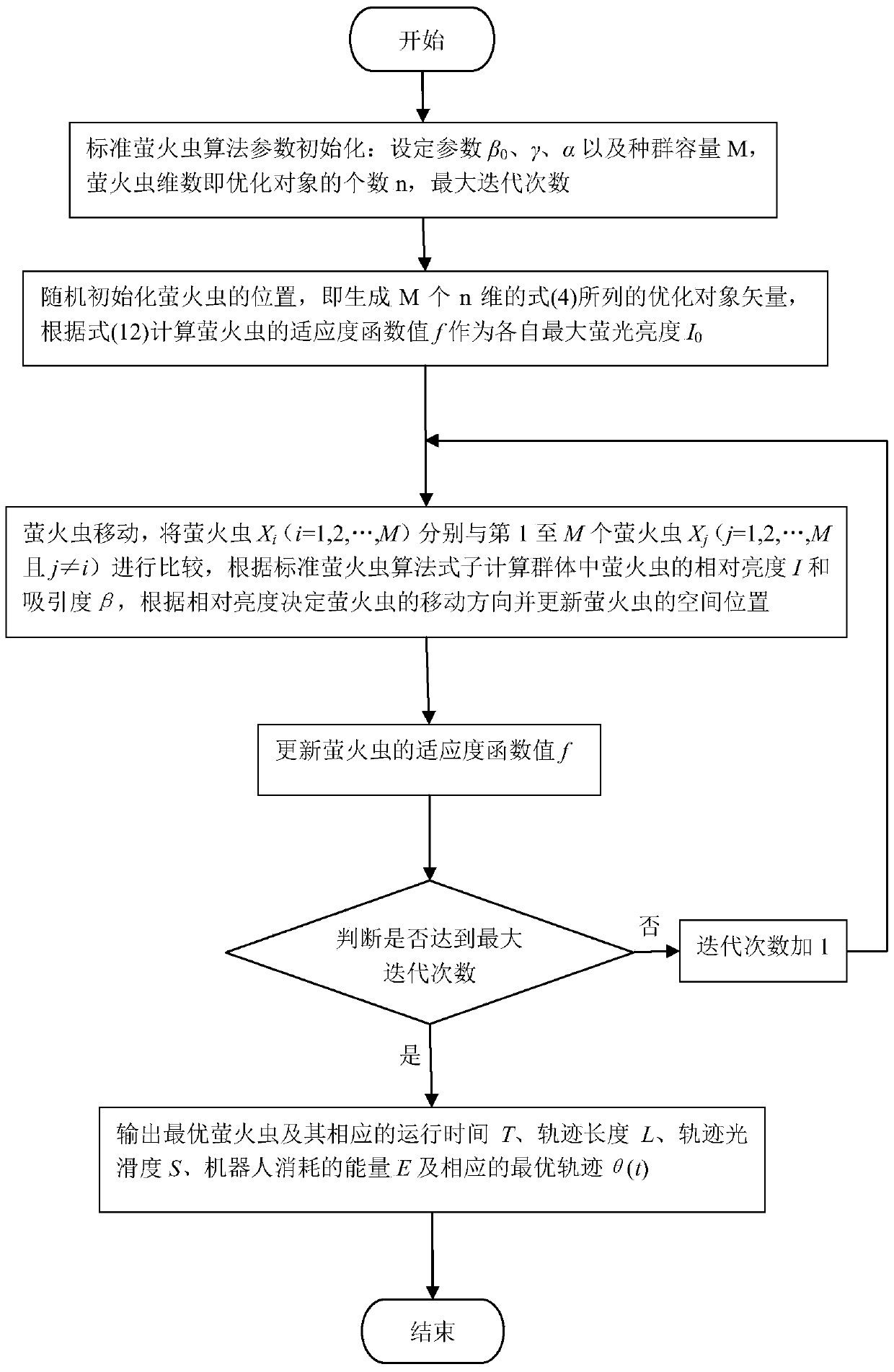
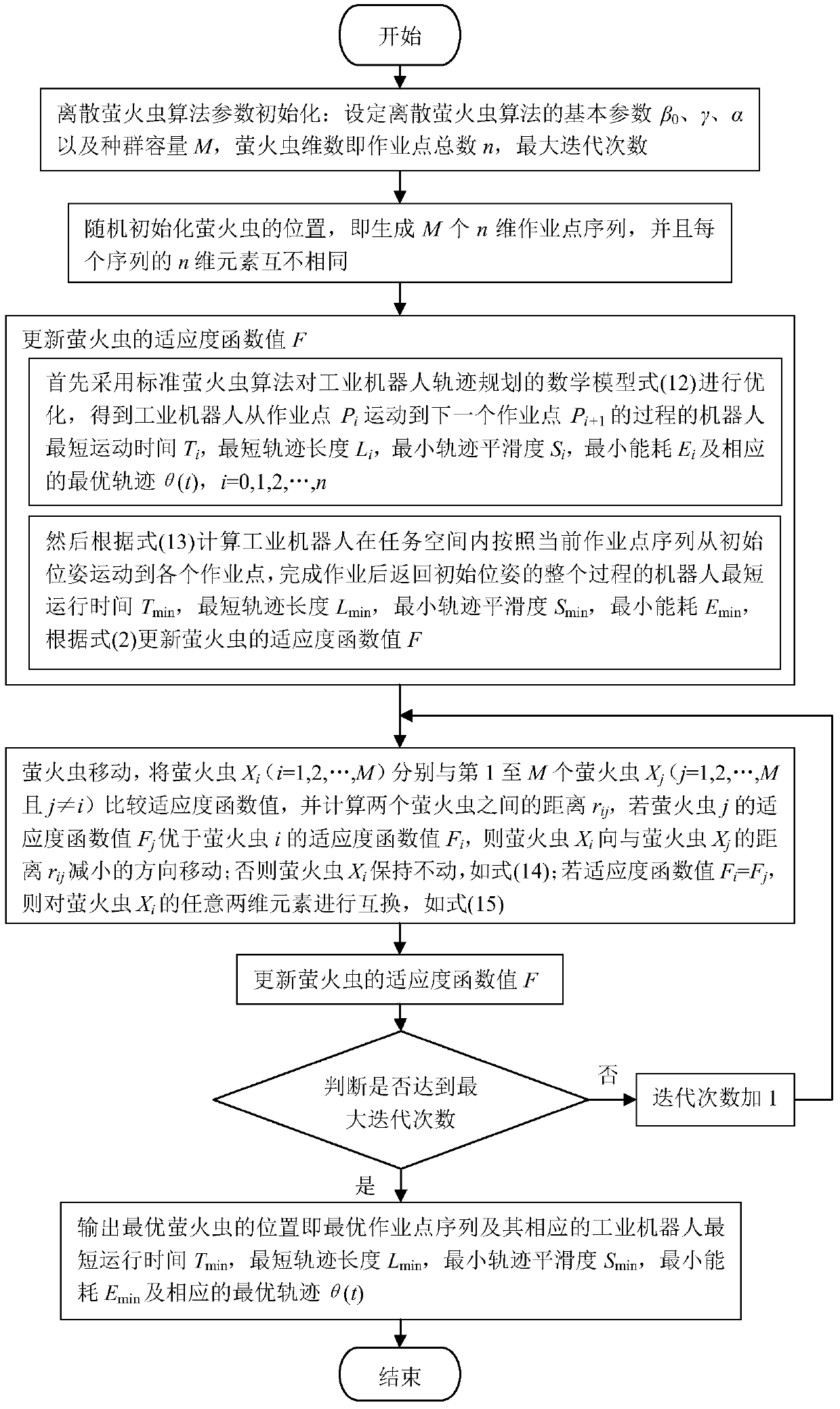
[0060] Since the present invention relates to the swarm intelligence algorithm used in industrial robot operation point sequence and trajectory planning, the following implementation plans will be described by taking the firefly algorithm as an example. Other swarm intelligence algorithms that meet the requirements can be implemented according to this plan, and the main steps are as follows:
[0061] Step 1. Based on the firefly algorithm, apply the algorithm to discrete space: redefine the position of fireflies and the distance between two fireflies, and redefine the movement rules of fireflies.
[0062] Definition 1) The position of fireflies: the position of each firefly corresponds to a sequence of operating points, and the position of the i-th firefly is denoted as X i =[x i,1 ,x i,2 ,...,x i,j ,...,x i,n ] T , indicating that the working process of the robot is according to the operation point P 1 ,P 2 ,...,P n The sequence is carried out, where n is the dimensio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More