Ankle rehabilitation robot based on three-freedom-degree parallel mechanism
A rehabilitation robot and degree-of-freedom technology, applied in passive exercise equipment, physical therapy, etc., can solve the problems of low efficiency, subjectivity of treatment effect, and unfavorable improvement of treatment plan, and achieve the effect of good rigidity and high control precision.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
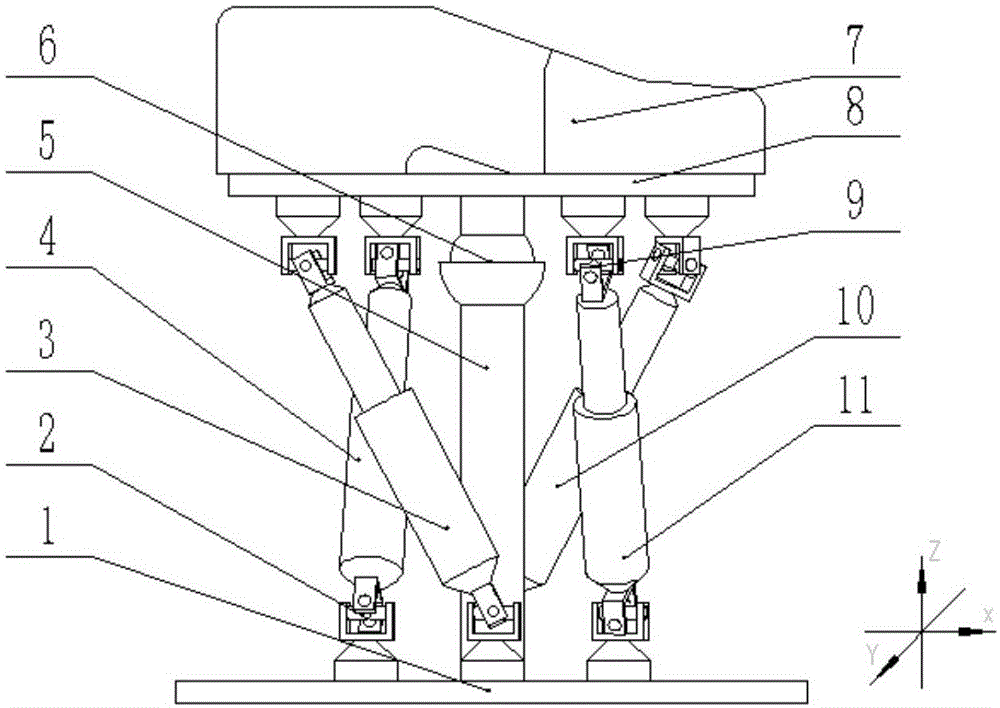
[0008] as attached figure 1 As shown, the ankle rehabilitation robot based on the parallel three-degree-of-freedom mechanism includes the lower platform of the ankle rehabilitation robot (1), four sets of servo actuators and matching servo valves (3), the dynamic platform of the ankle rehabilitation robot (8), four A set of hinges (2) connecting the servo actuator to the lower platform of the ankle rehabilitation robot, four sets of hinges (9) connecting the servo actuator to the moving platform of the ankle rehabilitation robot, and a limit rod fixed on the lower platform of the ankle rehabilitation robot ( 5), the ball hinge (6) that connects the limit rod and the upper platform of the ankle rehabilitation robot, and a set of foot fixing devices (7) that are fixed on the movable platform and can be adjusted in size. The mechanical part has three degrees of freedom of rotation about the horizontal direction. The servo actuator may be a hydraulic servo actuator, a pneumatic s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com