

Exoskeleton robot follow-up control device
一种外骨骼机器人、动力装置的技术,应用在程序控制机械手、机械手、制造工具等方向,能够解决外骨骼机器人结构复杂、动作滞后、协调性不好等问题,达到结构简单、良好协调性、实现成本低的效果
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
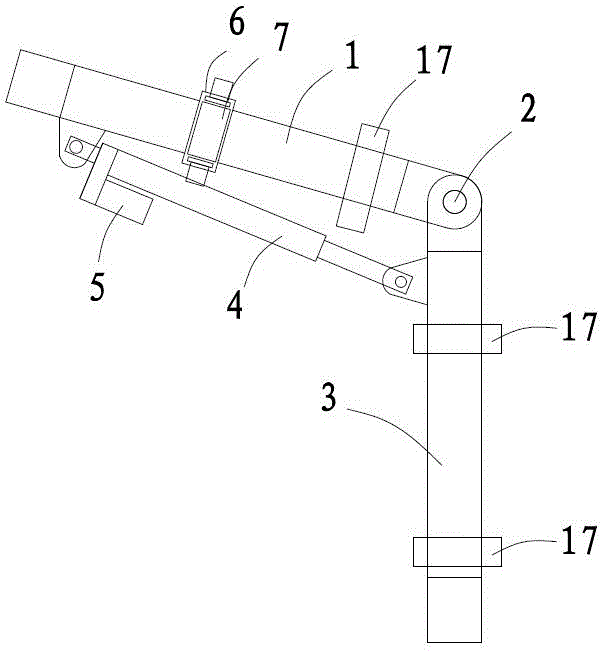
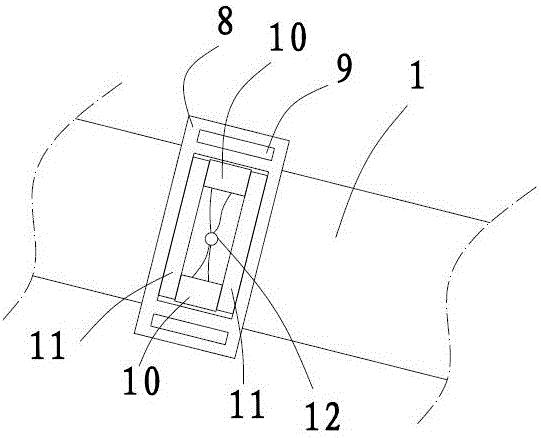
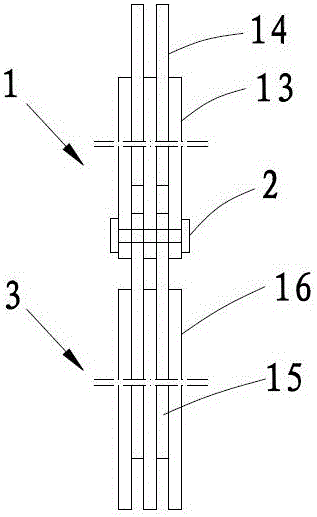
[0020] Embodiment: a kind of follow-up control device of exoskeleton robot, such as figure 1 shown. The device comprises an upper arm 1 and a lower arm 3, and the upper arm and the lower arm are rotationally connected by a joint 2. Such as image 3 As shown, the upper arm 1 is formed by alternately stacking three layers of upper arm connecting plates 13 and two layers of upper arm panels 14 , and the lower arm 3 is formed by alternately stacking two layers of lower arm connecting plates 15 and three layers of lower arm panels 16 . The upper arm connecting plate and the upper arm panel have the same length, and the lower end of the upper arm connecting plate protrudes downward, and the upper end of the upper arm panel protrudes upward, and the two form a staggered pattern. Correspondingly, the lower arm connecting plate and the lower arm panel have the same length, while the upper end of the lower arm connecting plate protrudes upwards, and the lower end of the lower arm pane...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More