

Adaptive microphone array sound positioning rescue robot and using method thereof
A microphone array and rescue robot technology, applied in the field of automatic search, can solve the problems of reduced accuracy of time delay estimation, inability to go deep into the scene, limited size of microphone array, etc., so as to improve the accuracy of time delay estimation and improve the accuracy of sound source orientation , Improve the effect of sound source localization accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] The technical solution of the invention will be further described below in conjunction with the embodiments and accompanying drawings.
[0043] Embodiment of sound localization rescue robot with adaptive microphone array
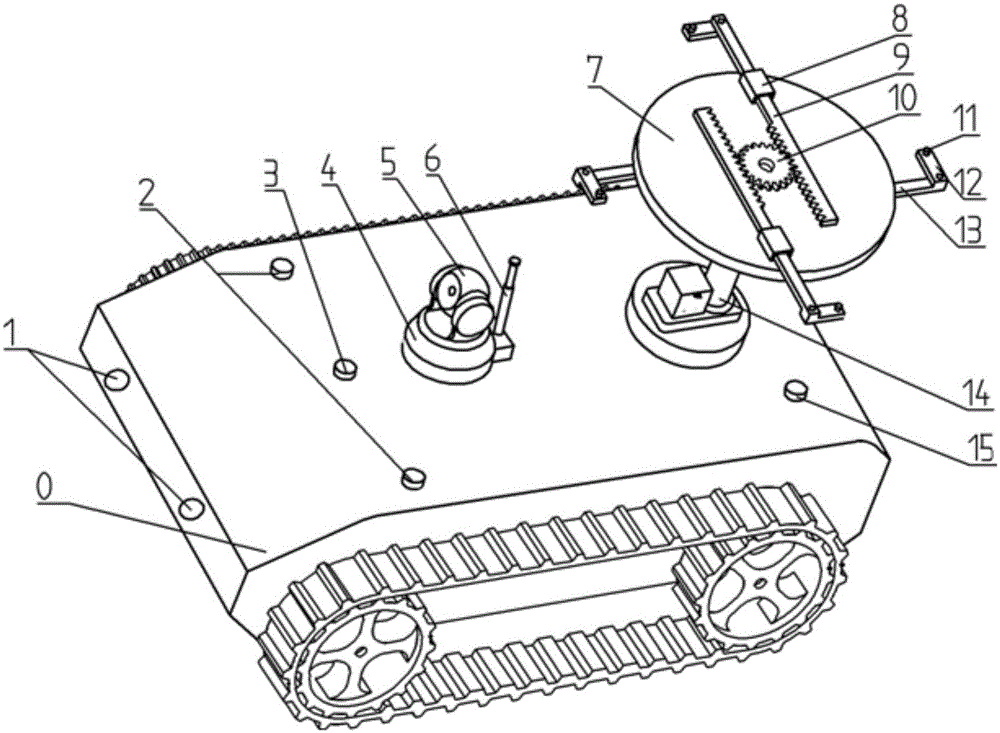
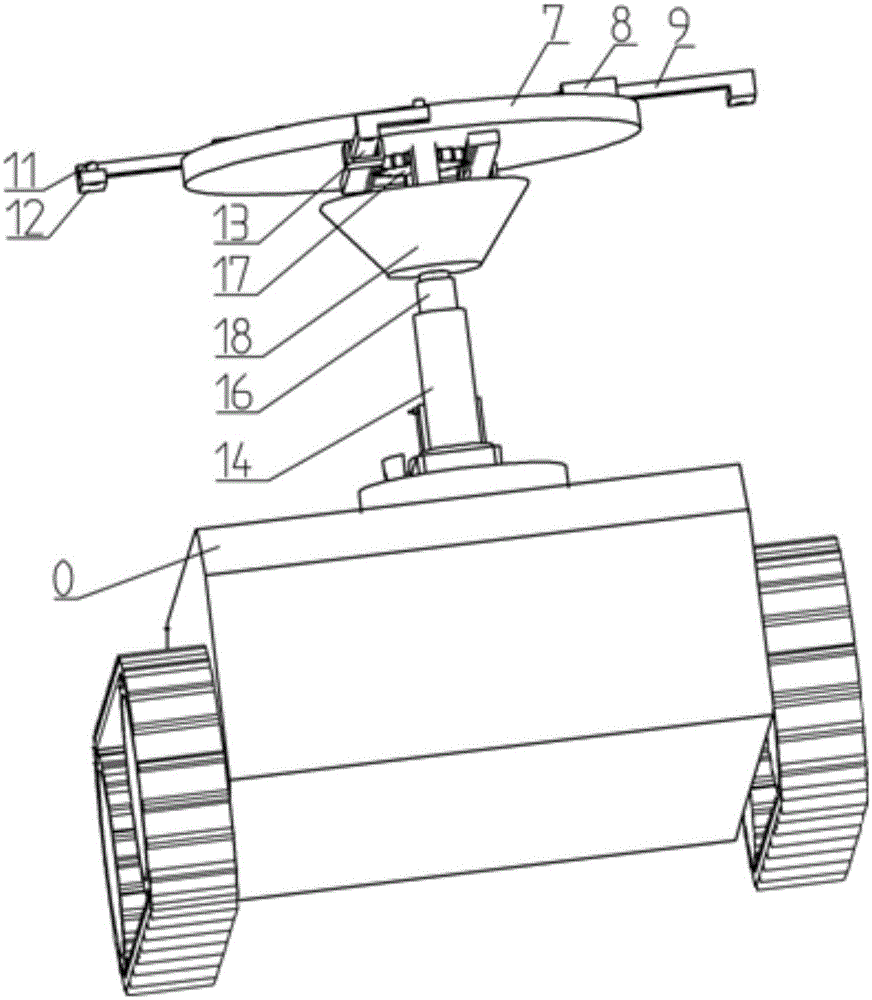
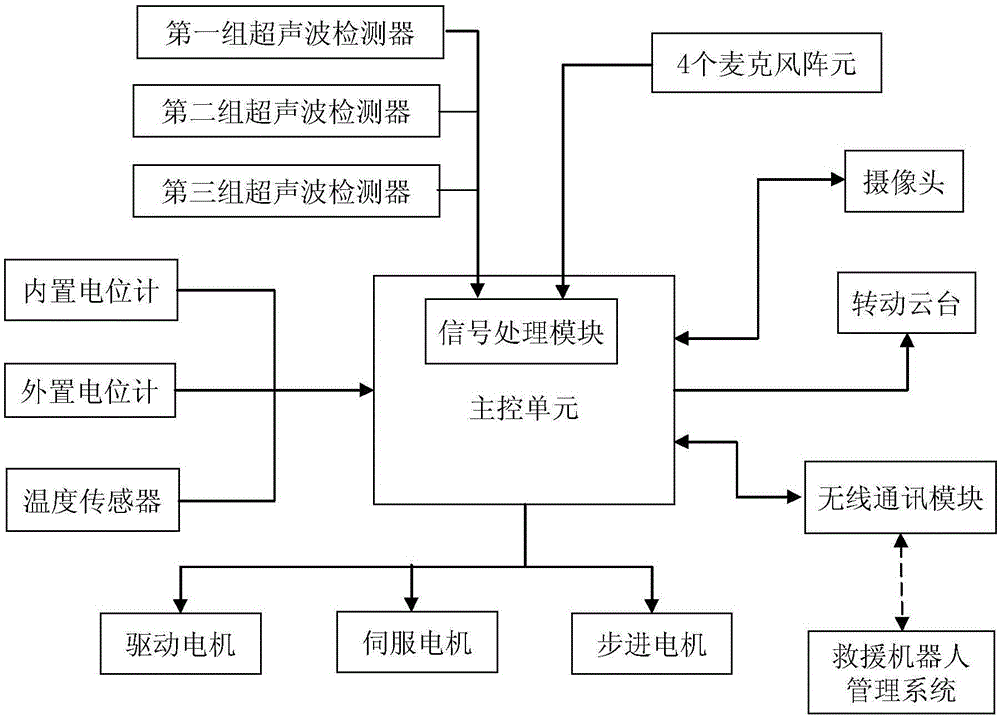
[0044] The structure of the sound positioning rescue robot embodiment of the adaptive microphone array is as follows: figure 1 and 2 As shown, it includes a car body with a traveling mechanism, a main control unit, a sound positioning module, and an obstacle avoidance module arranged on the car body 0. The traveling mechanism in this example includes a driving motor and a track wheel traveling device driven by it. Such as image 3 As shown, the driving motor of the traveling mechanism is connected with the main control unit. The main control unit includes a signal processing module, and the main control unit is connected with a wireless communication module, which is connected with the rescue robot management system through two-way wireless communi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More