

Sucking cup type wall face operation robot
A working robot and suction cup technology, applied in the field of intelligent robots, can solve the problems of dangerous operation, high cost, and low cleaning efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The purpose of the present invention is to provide a sucker type wall working robot that can be adsorbed on a rough vertical surface.
[0026] In order to enable those skilled in the art to better understand the technical solution of the present invention, the present invention will be described in detail below in conjunction with the accompanying drawings. The description in this part is only exemplary and explanatory, and should not have any limiting effect on the protection scope of the present invention. .
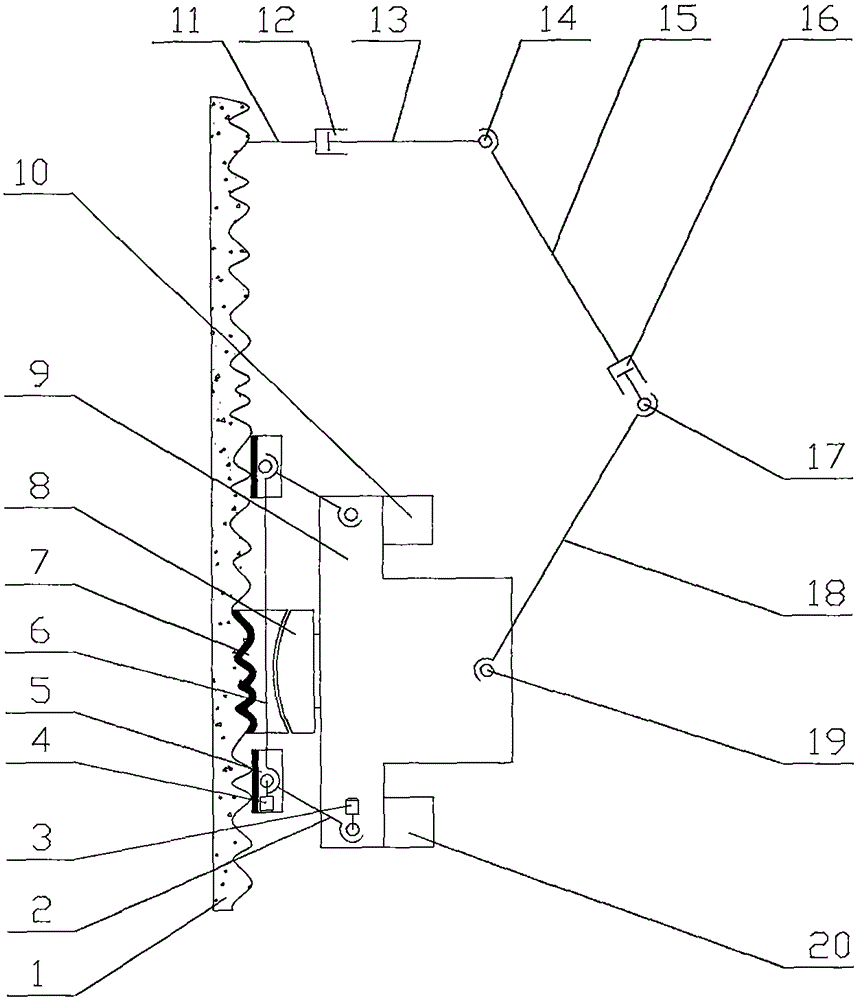
[0027] Please refer to figure 1 , in one embodiment, a suction cup type wall working robot provided by the present invention is used to perform work on a building exterior wall 1, including a working platform 8, a walking mechanism, a robot body, a pneumatic system 10 and an electric control system 20;
[0028] The traveling mechanism includes four walking suction cups 5, a working suction cup 7, a traveling motor 4, four rockers 2, two connecting rods 6, and ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More