Amphibious multi-environment operation robot
A working robot and robot technology, applied in the field of detection robots, can solve problems such as poor amphibious performance, complex structure, and poor structural reliability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0015] The present invention will be described in more detail below in conjunction with the accompanying drawings.
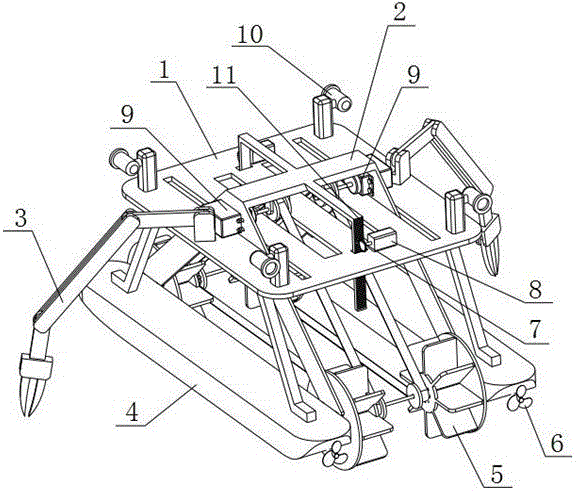
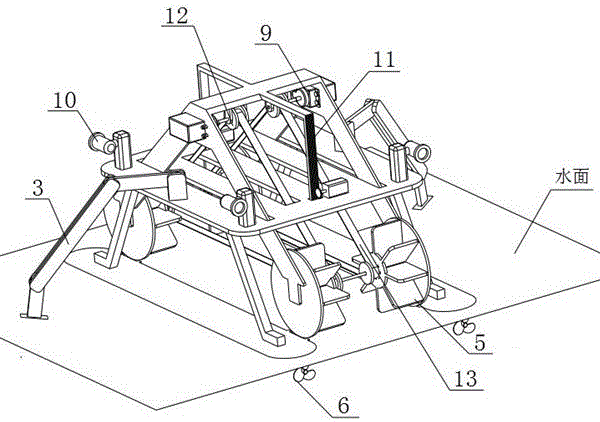
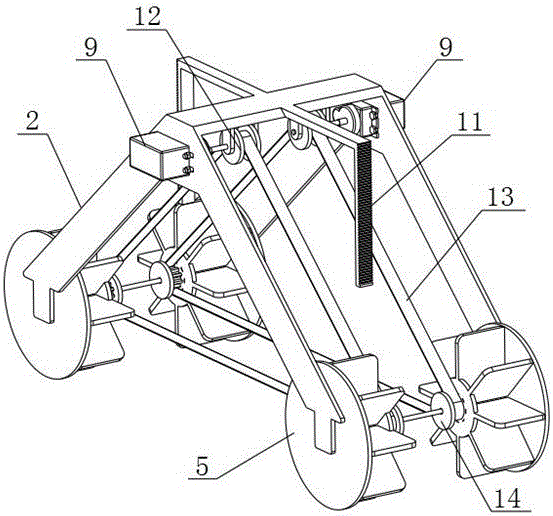
[0016] figure 1 It is a schematic diagram of the overall structure of the present invention, and the propellers 6 are installed at the tail of the lower floating body 4, one on the left and one on the left. Four cameras 10 are installed on the front, rear, left, and right sides of the upper platform 1 to realize the reconnaissance around the robot. The mechanical arm 3 is installed on the left and right sides of the upper platform 1 to realize the grasping of the target object and the removal of obstacles. The reduction motor 8 is installed on the upper platform 1, drives the rack 11 through the pinion 7, and realizes the up and down movement of the amphibious power unit. figure 2 It is a schematic diagram of the robot working in unobstructed open waters. The geared motor 8 drives the rack 11 through the pinion 7 to realize the amphibious power unit lifting o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More