

High-precision friction compensation control method of double-frame magnetic levitation CMG frame system
A frame system and friction compensation technology, applied in the field of servo system control, can solve problems such as enhancing the robustness of external disturbance torque and difficult to guarantee TDC stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach
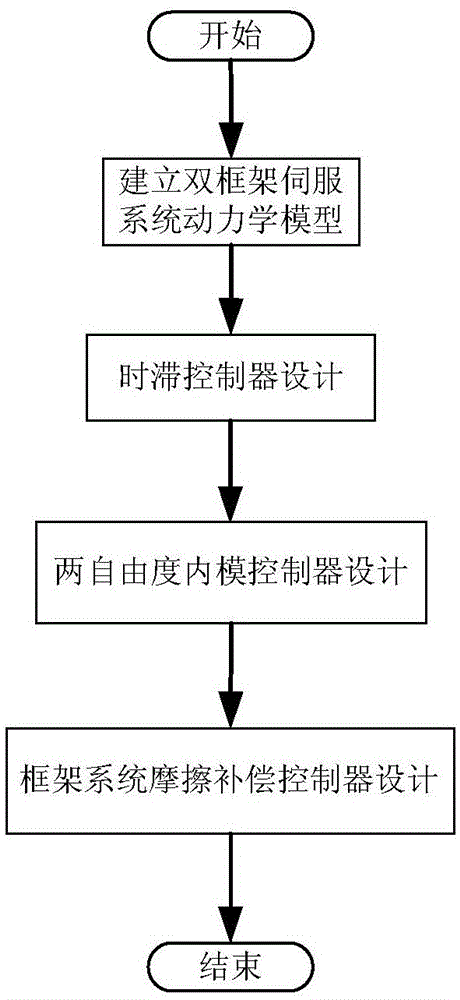
[0055] (1) Establish the dynamic model of the double frame servo system
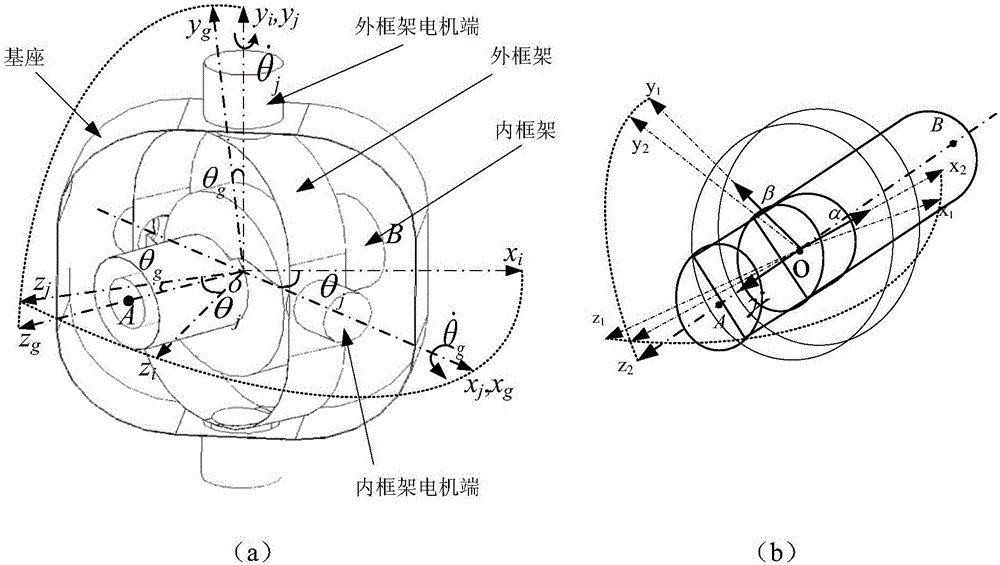
[0056] The coordinates of the maglev control moment gyro frame system and the high-speed rotor system are defined as figure 2 shown. ox i the y i z i is the inertial coordinate system, o is the geometric center of the gyroscope stator, x i In the initial state, coincide with the axis of the frame, and take the motor end of the frame as the positive direction, y i In the initial state, it points to the direction of the rotor rotation axis; ox j the y j z j It is the coordinate system of the outer frame, which is fixedly connected with the outer frame, coincides with the zero position system at zero position, and has relative inertial system with respect to y i The degree of freedom of the axis coincides with the inertial system in the initial state; ox g the y g z g It is the coordinate system of the inner frame, fixedly connected with the inner frame, relative to the outer frame system with r...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More