Intelligent sweeping robot
A sweeping robot, intelligent technology, applied in the field of sweeping robots
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0013] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the drawings in the embodiments of the present invention. Obviously, the described embodiments are part of the embodiments of the present invention, not all of them. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts shall fall within the protection scope of the present invention.
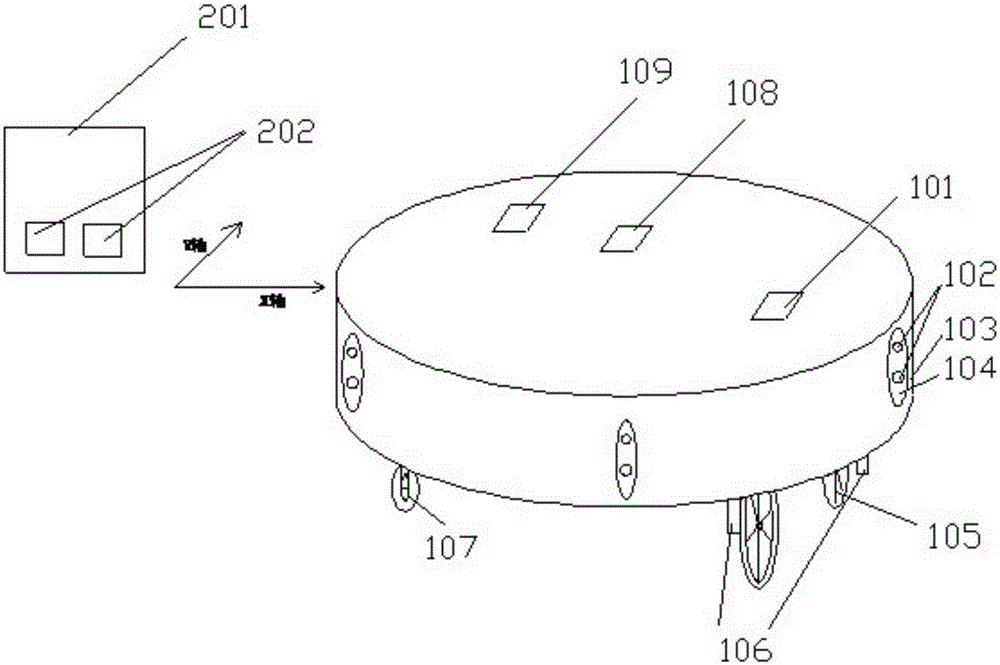
[0014] figure 1 is a schematic structural diagram of an intelligent sweeping robot according to an embodiment of the present invention. Including: angle sensor (101), body (102), infrared transceiver sensor (103), ultrasonic transceiver sensor (104), left and right wheels (105), left and right wheel Hall sensors (106), universal wheels (107), WIFI transceiver component (108), .
[0015] The embodiment of the present invention provides an intelligent swee...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



